Математичний маятник: період, прискорення та формули. Вільні вагання. Математичний маятник
Механічна система, що складається з матеріальної точки (тіла), що висить на нерозтяжній нитці (її маса мізерно мала в порівнянні з вагою тіла) в однорідному полі тяжкості, називається математичним маятником (інша назва - осцилятор). Бувають інші види цього пристрою. Замість нитки можна використовувати невагомий стрижень. Математичний маятник може наочно розкрити суть багатьох цікавих явищ. При малій амплітуді коливання його рух називається гармонійним.
Загальні відомості про механічну систему
Формула періоду коливання цього маятника було виведено голландським ученим Гюйгенсом (1629-1695 рр.). Цей сучасник І. Ньютона дуже захоплювався цією механічною системою. У 1656 р. він створив перші години з маятниковим механізмом. Вони вимірювали час із винятковою для тих часів точністю. Цей винахід став найважливішим етапом у розвитку фізичних експериментів та практичної діяльності.
Якщо маятник знаходиться в положенні рівноваги (висить прямовисно), то врівноважуватиметься силою натягу нитки. Плоский маятник на нерозтяжній нитці є системою з двома ступенями свободи із зв'язком. При зміні лише одного компонента змінюються параметри всіх її елементів. Так, якщо нитку замінити на стрижень, то дана механічна система матиме всього 1 ступінь свободи. Які ж властивості має математичний маятник? У цій простій системі під впливом періодичного обурення виникає хаос. У тому випадку, коли точка підвісу не рухається, а робить коливання, у маятника утворюється нове положення рівноваги. При швидких коливаннях вгору-вниз ця механічна система набуває стійкого положення «вгору дригом». Вона має і свою назву. Її називають маятником Капіци.
Властивості маятника

Математичний маятник має дуже цікаві властивості. Усі вони підтверджуються відомими фізичними законами. Період коливань іншого маятника залежить від різних обставин, таких як розмір і форма тіла, відстань між точкою підвісу і центром тяжкості, розподіл маси щодо даної точки. Саме тому визначення періоду тіла, що висить, є досить складним завданням. Набагато легше обчислюється період математичного маятника, формула якого буде наведена нижче. Внаслідок спостережень над подібними механічними системами можна встановити такі закономірності:
Якщо, зберігаючи однакову довжину маятника, підвішувати різні вантажі, то період їх коливань вийде однаковим, хоча їх маси сильно відрізнятимуться. Отже період такого маятника не залежить від маси вантажу.
Якщо при запуску системи відхиляти маятник на невеликі, але різні кути, то він коливатиметься з однаковим періодом, але за різними амплітудами. Поки відхилення від центру рівноваги невеликі, коливання за своєю формою будуть досить близькі гармонійним. Період такого маятника не залежить від коливальної амплітуди. Ця властивість даної механічної системи називається ізохронізмом (у перекладі з грецької «хронос» – час, «ізос» – рівний).
Період математичного маятника
Цей показник є періодом Незважаючи на складне формулювання, сам процес дуже простий. Якщо довжина нитки математичного маятника L, а прискорення вільного падіння g, ця величина дорівнює:
Період малих власних коливань жодною мірою залежить від маси маятника і амплітуди коливань. У цьому випадку маятник рухається як математичний із наведеною довжиною.
Коливання математичного маятника

Математичний маятник здійснює коливання, які можна описати простим диференціальним рівнянням:
x + ω2 sin x = 0,
де х (t) - невідома функція (це кут відхилення від нижнього положення рівноваги у момент t, виражений у радіанах); ω – позитивна константа, яка визначається з параметрів маятника (ω = √g/L, де g – це прискорення вільного падіння, а L – довжина математичного маятника (підвіс).
Рівняння малих коливань поблизу положення рівноваги (гармонічне рівняння) виглядає так:
x + ω2 sin x = 0
Коливальні рухи маятника
Математичний маятник, який здійснює малі коливання, рухається по синусоїді. Диференціальне рівняння другого порядку відповідає всім вимогам та параметрам такого руху. Для визначення траєкторії необхідно задати швидкість та координату, з яких потім визначаються незалежні константи:
x = A sin (θ 0 + ωt),
де θ 0 - Початкова фаза, A - амплітуда коливання, ω - циклічна частота, що визначається з рівняння руху.
Математичний маятник (формули для великих амплітуд)
Ця механічна система, що робить свої коливання зі значною амплітудою, підпорядковується складнішим законам руху. Для такого маятника вони розраховуються за такою формулою:
sin x/2 = u * sn(ωt/u),
де sn - синус Якобі, який для u< 1 является периодической функцией, а при малых u он совпадает с простым тригонометрическим синусом. Значение u определяют следующим выражением:
u = (ε + ω2)/2ω2,
де ε = E/mL2 (mL2 – енергія маятника).
Визначення періоду коливання нелінійного маятника здійснюється за такою формулою:
де Ω = π/2 * ω/2K(u), K - еліптичний інтеграл, π - 3,14.

Рух маятника по сепаратрисі
Сепаратрисою називають траєкторію динамічної системи, яка має двовимірний фазовий простір. Математичний маятник рухається неперіодично. У нескінченно дальньому моменті часу він падає з крайнього верхнього положення убік із нульовою швидкістю, потім поступово набирає її. Зрештою він зупиняється, повернувшись у вихідне становище.
Якщо амплітуда коливань маятника наближається до π Це свідчить про те, що рух на фазовій площині наближається до сепаратриси. І тут під впливом малої змушує періодичної сили механічна система виявляє хаотичне поведінка.
При відхиленні математичного маятника від положення рівноваги з деяким кутом φ виникає дотична сила тяжкості Fτ = -mg sin φ. Знак «мінус» означає, що ця дотична складова прямує у протилежний від відхилення маятника бік. При позначенні через x усунення маятника по дузі кола з радіусом L його кутове усунення дорівнює φ = x/L. Другий закон призначений для проекцій та сили, дасть шукане значення:
mg τ = Fτ = -mg sin x/L
Виходячи з цього співвідношення, видно, що цей маятник є нелінійною системою, оскільки сила, яка прагне повернути його в положення рівноваги, завжди пропорційна не зсуву x, а sin x/L.
Тільки тоді, коли математичний маятник здійснює малі коливання, він гармонійний осцилятор. Іншими словами, він стає механічною системою, здатною виконувати гармонійні коливання. Таке наближення практично справедливе для кутів 15-20°. Коливання маятника з великими амплітудами перестав бути гармонійним.
Закон Ньютона для малих коливань маятника

Якщо дана механічна система виконує малі коливання, 2-й закон Ньютона виглядатиме таким чином:
mg τ = Fτ = -m * g/L * x.
Виходячи з цього, можна зробити висновок, що математичного маятника пропорційно його зсуву зі знаком «мінус». Це і є умовою, завдяки якій система стає гармонійним осцилятором. Модуль коефіцієнта пропорційності між зміщенням та прискоренням дорівнює квадрату кругової частоти:
ω02 = g/L; ω0 = √g/L.
Ця формула відбиває свою частоту мінімальних коливань цього виду маятника. Виходячи з цього,
T = 2π/ω0 = 2π√g/L.
Обчислення на основі закону збереження енергії
Властивості маятника можна описати за допомогою закону збереження енергії. При цьому слід враховувати, що маятник у полі тяжкості дорівнює:
E = mg∆h = mgL(1 - cos α) = mgL2sin2 α/2
Повна дорівнює кінетичній або максимальній потенційній: Epmax = Ekmsx = E
Після того як буде записано закон збереження енергії, беруть похідну від правої та лівої частин рівняння:
Оскільки похідна від постійних величин дорівнює 0, то (Ep + Ek)" = 0. Похідна суми дорівнює сумі похідних:
Ep" = (mg/L*x2/2)" = mg/2L*2x*x" = mg/L*v + Ek" = (mv2/2) = m/2(v2)" = m/2* 2v*v" = mv* α,
отже:
Mg/L*xv + mva = v (mg/L*x + mα) = 0.
З останньої формули знаходимо: α = - g/L*x.
Практичне застосування математичного маятника
Прискорення змінюється з географічною широтою, оскільки щільність земної кори по всій планеті однакова. Там, де залягають породи з більшою щільністю, воно буде дещо вищим. Прискорення математичного маятника часто застосовують для геологорозвідки. Його допомогою шукають різні корисні копалини. Просто підрахувавши кількість коливань маятника, можна виявити у надрах Землі кам'яне вугілля чи руду. Це пов'язано з тим, що такі копалини мають щільність і масу більше, ніж пухкі гірські породи, що лежать під ними.

Математичним маятником користувалися такі визначні вчені, як Сократ, Аристотель, Платон, Плутарх, Архімед. Багато хто з них вірив у те, що ця механічна система може впливати на долю і життя людини. Архімед використав математичний маятник під час своїх обчислень. У наш час багато окультистів та екстрасенсів користуються цією механічною системою для здійснення своїх пророцтв або пошуку зниклих людей.
Відомий французький астроном і дослідник природи К. Фламмаріон для своїх досліджень також використав математичний маятник. Він стверджував, що з його допомогою йому вдалося передбачити відкриття нової планети, появу Тунгуського метеориту та інші події. Під час Другої світової війни у Німеччині (м. Берлін) працював спеціалізований Інститут маятника. У наші дні подібними дослідженнями зайнятий Мюнхенський інститут парапсихології. Свою роботу з маятником співробітники цього закладу називають «радіестезією».
10.4. Закон збереження енергії при гармонійних коливаннях
10.4.1. Збереження енергії при механічних гармонічних коливаннях
Збереження енергії при коливаннях математичного маятника
При гармонійних коливаннях повна механічна енергія системи зберігається (залишається постійною).
Повна механічна енергія математичного маятника
E = W k + W p ,
де W k – кінетична енергія, W k = = mv 2/2; W p - потенційна енергія, W p = mgh; m – маса вантажу; g – модуль прискорення вільного падіння; v – модуль швидкості вантажу; h – висота підйому вантажу над положенням рівноваги (рис. 10.15).
При гармонійних коливаннях математичний маятник проходить ряд послідовних станів, тому доцільно розглянути енергію математичного маятника у трьох положеннях (див. рис. 10.15):
Рис. 10.15
1) у становищі рівноваги
потенційна енергія дорівнює нулю; повна енергія збігається з максимальною кінетичною енергією:
E = W k max;
2) у крайньому становищі(2 ) тіло піднято над вихідним рівнем на максимальну висоту h max тому потенційна енергія також максимальна:
W p max = m g h max;
кінетична енергія дорівнює нулю; повна енергія збігається з максимальною потенційною енергією:
E = W p max;
3) у проміжному положенні(3 ) тіло має миттєву швидкість v і піднято над вихідним рівнем на деяку висоту h , тому повна енергія являє собою суму
E = m v 2 2 + m g h ,
де mv 2/2 - кінетична енергія; mgh – потенційна енергія; m – маса вантажу; g – модуль прискорення вільного падіння; v – модуль швидкості вантажу; h - висота підйому вантажу над положенням рівноваги.
При гармонійних коливаннях математичного маятника повна механічна енергія зберігається:
E=const.
Значення повної енергії математичного маятника у трьох його положеннях відображені у табл. 10.1.
| № | Положення | W p | W k | E = W p + W k |
|---|---|---|---|---|
| 1 | Рівновість | 0 | m v max 2/2 | m v max 2/2 |
| 2 | Крайнє | mgh max | 0 | mgh max |
| 3 | Проміжне (миттєве) | mgh | mv 2/2 | mv 2/2 + mgh |
Значення повної механічної енергії представлені в останньому стовпці табл. 10.1, мають рівні значення для будь-яких положень маятника, що є математичним виразом:
m v max 2 2 = m g h max;
m v max 2 2 = m v 2 2 + m g h;
m g h max = m v 2 2 + m g h ,
де m – маса вантажу; g – модуль прискорення вільного падіння; v - модуль миттєвої швидкості вантажу в положенні 3; h - висота підйому вантажу над положенням рівноваги в положенні 3; v max - модуль максимальної швидкості вантажу в положенні 1; h max - максимальна висота підйому вантажу над положенням рівноваги у положенні 2 .
Кут відхилення ниткиматематичного маятника від вертикалі (рис. 10.15) визначається виразом
cos α = l − h l = 1 − h l ,
де l – довжина нитки; h - висота підйому вантажу над положенням рівноваги.
Максимальний кутвідхилення α max визначається максимальною висотою підйому вантажу над положенням рівноваги h max:
cos α max = 1 − h max l.
Приклад 11. Період малих коливань математичного маятника дорівнює 0,9 с. На який максимальний кут від вертикалі відхилятиметься нитка, якщо, проходячи положення рівноваги, кулька рухається зі швидкістю, що дорівнює 1,5 м/с? Тертя в системі відсутнє.
Рішення . На малюнку показано два положення математичного маятника:

- положення рівноваги 1 (характеризується максимальною швидкістю кульки v max);
- крайнє положення 2 (характеризується максимальною висотою підйому кульки h max над положенням рівноваги).
Шуканий кут визначається рівністю
cos α max = l − h max l = 1 − h max l ,
де l – довжина нитки маятника.
Максимальну висоту підйому кульки маятника над положенням рівноваги знайдемо із закону збереження повної механічної енергії.
Повна енергія маятника в положенні рівноваги та в крайньому положенні визначається такими формулами:
- у положенні рівноваги -
E 1 = m v max 2 2
де m – маса кульки маятника; v max – модуль швидкості кульки у положенні рівноваги (максимальна швидкість), v max = 1,5 м/с;
- у крайньому становищі -
E 2 = mgh max
де g – модуль прискорення вільного падіння; h max – максимальна висота підйому кульки над положенням рівноваги.
Закон збереження повної механічної енергії:
m v max 2 2 = m g h max.
Виразимо звідси максимальну висоту підйому кульки над положенням рівноваги:
h max = v max 2 2 g.
Довжину нитки визначимо з формули для періоду коливань математичного маятника
T = 2 π l g ,
тобто. довжина нитки
l = T2g4π2.
Підставимо h max і l у вираз для косинуса шуканого кута:
cos α max = 1 − 2 π 2 v max 2 g 2 T 2
і зробимо обчислення з урахуванням приблизної рівності π 2 = 10:
cos α max = 1 − 2 ⋅ 10 ⋅ (1,5) 2 10 2 ⋅ (0,9) 2 = 0,5 .
Звідси випливає, що максимальний кут відхилення 60°.
Строго кажучи, при вугіллі 60° коливання кульки є малими і користуватися стандартною формулою для періоду коливань математичного маятника неправомірно.
Збереження енергії при коливаннях пружинного маятника
Повна механічна енергія пружинного маятникаскладається з кінетичної енергії та потенційної енергії:

E = W k + W p ,
де W k – кінетична енергія, W k = mv 2/2; W p - Потенційна енергія, W p = k (Δx) 2 /2; m – маса вантажу; v – модуль швидкості вантажу; k – коефіцієнт жорсткості (пружності) пружини; Δx - деформація (розтяг або стиснення) пружини (рис. 10.16).
У Міжнародній системі одиниць енергія механічної коливальної системи вимірюється у джоулях (1 Дж).
При гармонійних коливаннях пружинний маятник проходить ряд послідовних станів, тому доцільно розглянути енергію пружинного маятника у трьох положеннях (див. рис. 10.16):
1) у становищі рівноваги(1 ) швидкість тіла має максимальне значення v max , тому кінетична енергія також максимальна:
W k max = m v max 2 2;
потенційна енергія пружини дорівнює нулю, оскільки пружина не деформована; повна енергія збігається з максимальною кінетичною енергією:
E = W k max;
2) у крайньому становищі(2 ) пружина має максимальну деформацію (Δx max), тому потенційна енергія також має максимальне значення:
W p max = k (Δ x max) 2 2;
кінетична енергія тіла дорівнює нулю; повна енергія збігається з максимальною потенційною енергією:
E = W p max;
3) у проміжному положенні(3 ) тіло має миттєву швидкість v , пружина має в цей момент деяку деформацію (Δx ), тому повна енергія являє собою суму
E = m v 2 2 + k (Δ x) 2 2
де mv 2/2 - кінетична енергія; k (Δx) 2/2 - потенційна енергія; m – маса вантажу; v – модуль швидкості вантажу; k – коефіцієнт жорсткості (пружності) пружини; Δx - деформація (розтяг або стиснення) пружини.
При усуненні вантажу пружинного маятника від положення рівноваги на нього діє повертаюча сила, проекція якої на напрямок руху маятника визначається формулою
F x = −kx ,
де x - зсув вантажу пружинного маятника від положення рівноваги, x = ∆x, ∆x - деформація пружини; k – коефіцієнт жорсткості (пружності) пружини маятника.
При гармонійних коливаннях пружинного маятника повна механічна енергія зберігається:
E=const.
Значення повної енергії пружинного маятника у трьох його положеннях відображені у табл. 10.2.
| № | Положення | W p | W k | E = W p + W k |
|---|---|---|---|---|
| 1 | Рівновість | 0 | m v max 2/2 | m v max 2/2 |
| 2 | Крайнє | k (Δx max) 2 /2 | 0 | k (Δx max) 2 /2 |
| 3 | Проміжне (миттєве) | k (Δx) 2 /2 | mv 2/2 | mv 2 /2 + k (Δx) 2 /2 |
Значення повної механічної енергії, представлені в останньому стовпці таблиці, мають рівні значення для будь-яких положень маятника, що є математичним виразом закону збереження повної механічної енергії:
m v max 2 2 = k (Δ x max) 2 2;
m v max 2 2 = m v 2 2 + k (Δ x) 2 2;
k (Δ x max) 2 2 = m v 2 2 + k (Δ x) 2 2
де m – маса вантажу; v - модуль миттєвої швидкості вантажу в положенні 3; Δx - деформація (розтяг або стиснення) пружини в положенні 3 ; v max - модуль максимальної швидкості вантажу в положенні 1; Δx max - максимальна деформація (розтяг або стиснення) пружини в положенні 2 .
Приклад 12. Пружинний маятник здійснює гармонійні коливання. У скільки разів його кінетична енергія більша за потенційну в той момент, коли зміщення тіла з положення рівноваги становить чверть амплітуди?
Рішення . Порівняємо два положення пружинного маятника:
- крайнє положення 1 (характеризується максимальним усуненням вантажу маятника від положення рівноваги x max);
- проміжне положення 2 (характеризується проміжними значеннями усунення положення рівноваги x і швидкості v →).
Повна енергія маятника в крайньому та проміжному положеннях визначається такими формулами:
- у крайньому становищі -
E 1 = k (Δ x max) 2 2
де k – коефіцієнт жорсткості (пружності) пружини; ∆x max - амплітуда коливань (максимальне усунення положення рівноваги), ∆x max = A ;
- у проміжному положенні -
E 2 = k (Δ x) 2 2 + m v 2 2
де m – маса вантажу маятника; ∆x - усунення вантажу від положення рівноваги, ∆x = A /4.
Закон збереження повної механічної енергії для пружинного маятника має такий вигляд:
k (Δ x max) 2 2 = k (Δ x) 2 2 + m v 2 2 .
Розділимо обидві частини записаної рівності на k (∆x ) 2 /2:
(Δ x max Δ x) 2 = 1 + m v 2 2 ⋅ 2 k Δ x 2 = 1 + W k W p ,
де W k - кінетична енергія маятника у проміжному положенні, W k = mv 2/2; W p - Потенційна енергія маятника в проміжному положенні, W p = k (∆x) 2 /2.
Виразимо з рівняння шукане відношення енергій:
W k W p = (Δ x max Δ x) 2 − 1
і розрахуємо його значення:
W k W p = (A A / 4) 2 − 1 = 16 − 1 = 15 .
У зазначений момент часу відношення кінетичної та потенційної енергії маятника дорівнює 15.
МЕТА: експериментально перевірити закон збереження енергії поступально-обертального руху на маятнику Максвелла; визначити швидкість поступального руху маятника за енергетичними та кінематичними співвідношеннями та порівняти їх.
ОБЛАДНАННЯ: маятник Максвелла зі змінними кільцями; електронний секундомір.
ОСНОВИ ТЕОРІЇ
Найбільш загальним заходом руху матерії є її енергія. У механіці це механічна енергія, що відповідає механічному руху тіл. Розрізняють два види механічної енергії: кінетичну та потенційну.
Потенційна енергія. Енергія, що визначається взаємним розташуваннямвзаємодіючих тіл і залежить тільки від координат, називається потенційною. Робота А 12 , що здійснюється консервативними силами при перекладі системи з одного стану в інший, дорівнює убутку потенційної енергії в цих станах .
А 12 = W 1 - W 2 , (1)
де W 1 і W 2 відповідно потенційна енергія системи у станах 1 та 2.
Конкретний вид потенційної енергії залежить характеру силового поля. У полі сили тяжіння потенційна енергія тіла маси mмає вид:
W = m·g·h , (2)
де g прискорення вільного падіння;
h висота, відрахована від рівня, де потенційна енергія W=0.
Кінетична енергія. Це енергія, яку має тіло (або система тіл) завдяки їхньому руху. Якщо тіло рухається поступально зі швидкістю vі одночасно обертається навколо деякої осі з кутовою швидкістю , то повна кінетична енергія його руху дорівнює:
де mмаса тіла;
I момент інерції.
Як видно, при обертальному русі роль лінійної швидкості грає кутова швидкість, а роль маси - момент інерції. Момент імпульсу Iзалежить як від маси, а й від розподілу цієї маси щодо осі обертання. Значення Iдля деяких тіл правильної геометричної форми (довгий стрижень, диск, куля, циліндр) наведено у підручниках за курсом загальної фізики.
Закон збереження енергії. Механічна енергія замкнутої системи тіл, між якими діють консервативні сили, залишається постійною. У таких системах під час руху тіла відбувається перетворення кінетичної енергії на потенційну і назад, а повна енергія залишається постійною. (До консервативних сил відносяться гравітаційні, пружні, кулонівські та ін. Неконсервативними силами є сили тертя, опору, непружних деформацій.).
Механічна енергія зберігається і в незамкнутих системах, якщо зовнішні сили не виконують роботу, оскільки мірою вимірювання енергії є робота, що здійснюється.
МЕТОДИКА ЕКСПЕРИМЕНТУ
Перевірка закону збереження енергії поступально-обертального руху тіла виконується на маятнику Максвелла. Маятник Максвелла це диск, закріплений на осі. Ось у свою чергу підвішена на двох нитках, закріплених верхніми кінцями на кронштейнах.
Ці нитки можуть намотуватися на вісь, а під час розкручування їх маятник здійснює поступально-обертальний рух, тобто. піднімається та опускається, обертаючись.
У процесі експерименту виділено два основні стани. У стані 1 маятник масою mзнаходиться на висоті h. Механічна енергія системи в цьому стані дорівнює лише потенційній енергії:
E 1 = W 1 = m · g · h. (4)
Відпустимо маятник. Під дією рівнодіючої сил тяжкості та натягу нитки він починає падати вниз (поступальний рух), а сили натягу ниток приведуть його до обертального руху.

Рис. 1. Загальний вигляд маятника Максвелла.
Т- сила натягу нитки; F g - сила тяжіння.
У стані 2 маятник, що опустився з висоти h, рухається поступово зі швидкістю v,обертаючись при цьому навколо осі, що проходить через центр мас з кутовою швидкістю .Отже, механічна енергія системи в стані 2 складається з кінетичних енергій поступального та обертального руху:
 . (5)
. (5)
У виділеній системі (маятник у полі сил тяжіння) має виконуватися закон збереження енергії. Сила тяжіння – консервативна сила. Сила натягу нитки є зовнішньою силою. але вона робить роботи, т.к. її точка програми при малому повороті маятника залишається дома. Отже:
 .
(6)
.
(6)
Швидкість поступального руху маятника пов'язана з кутовою швидкістю співвідношенням
v = ·r, (7)
де rрадіус осі маятника.
Тоді формула (6) набуде вигляду:
2gh = v 2 (1+I/mr 2). (8)
А швидкість поступального руху маятника набуває значення:
 .
(9)
.
(9)
Для перевірки закону збереження енергії обчислимо швидкість іншим незалежним способом, використовуючи відомі кінематичні співвідношення. Т. к. рух маятника є рівноприскореним, то якщо за час падіння tмаятник пройшов шлях h, його прискорення одно
a = 2h/t2. (10)
Звідси швидкість поступального руху маятника наприкінці шляху:
v = t = 2h/t. (11)
Швидкість (9) залежить від моменту інерції маятника, який можна змінювати, встановлюючи на диск різні кільця. Момент інерції маятника визначається як
I = I 0 + I Д + I К. (12)
де I 0 - момент інерції осі,
 - момент інерції диска
- момент інерції диска
 - момент інерції кільця,
- момент інерції кільця,
R Д , R До- радіуси диска та кільця.
Радіус кільця береться як середнє між внутрішнім і зовнішнім радіусами. Так як радіус осі маятника значно менший за радіус диска, моментом інерції осі можна знехтувати.
Логічна схема методу.
Якщо швидкість, визначена із закону збереження енергії за співвідношенням (9) дорівнюватиме швидкості, визначеної кінематично за формулою (11), це підтверджує збереження енергії для виділеної системи.
ВИКОНАННЯ РОБОТИ
1. Виміряйте час падіння маятника з одним із кілець, зазначених викладачем.
2. Повторіть вимірювання 5-10 разів.
3. Виміряйте висоту падіння та висоту підйому маятника.
4. Виміряйте штангенциркулем діаметр осі маятника, внутрішній та зовнішній діаметр кільця.
ОБРОБКА РЕЗУЛЬТАТІВ
1. Обчисліть середнє значення часу падіння
2. Розрахуйте швидкість v 1 за співвідношенням (11).
3. Обчисліть похибку вимірювання швидкості v 1 за правилом обчислення похибки для непрямих вимірів.
4. Обчисліть момент інерції маятника з кільцем. Маси диска та кільця нанесені на них.
5. Обчисліть швидкість маятника v 2 за співвідношенням (9).
6. Визначте міру розбіжності = ( v 1 - v 2 )/ v 1 і порівняйте із відносною похибкою v 1 = v 1 / v 1 .
ДОДАТКОВЕ ЗАВДАННЯ
Визначте втрати енергії по різниці між висотою падіння та наступною висотою підйому маятника.
Обчисліть середню ефективну силу тертя, що створює втрати енергії.
КОНТОЛЬНІ ПИТАННЯ
1. Які види механічної енергії? Дайте їх визначення.
2. Сформулюйте закон збереження механічної енергії системи та умови її виконання.
3. Опишіть перетворення енергії для маятника Максвелла.
4. Що таке момент інерції тіла? Чому дорівнює момент інерції диска, кільця?
5. Як визначається швидкість поступального руху маятника Максвелла?
Невелика кулька, підвішена на легкій нерозтяжній нитці, здатна здійснювати вільнеколивальний рух (рис. 598).
Рис. 598
Для опису руху маятника вважатимемо кульку матеріальною точкою, нехтуємо масою нитки та опором повітря. Така модель називається математичним маятником.
Як координата, що описує положення кульки, виберемо кут відхилення нитки від вертикалі. φ
. Для опису зміни цієї координати зручно використовувати рівняння динаміки обертального руху ![]()
де J = ml 2− момент інерції системи, ε = Δω/Δt− кутове прискорення тіла (друга похідна від кута повороту), M− сумарний момент зовнішніх сил, що діють на систему 1 . На кульку діють сили тяжіння mg та натягу нитки. Момент сили натягу нитки Nщодо точки підвісу дорівнює нулю, тому рівняння (1) для підвішеної кульки набуває вигляду
або ![]()
Це рівняння визначає коливання маятника, але є рівнянням гармонійних коливань, оскільки момент сил пропорційний синусу кута відхилення, а чи не самому куту. Однак, якщо вважати кути відхилення малими (скільки це – ми з'ясуємо пізніше), можна скористатися наближеною формулою sinφ ≈ φу цьому наближенні рівняння (3) перетворюється на знайоме рівняння гармонійних коливань ![]()
де Ω = √(g/l)− кругова частота малих коливань маятника 2 . Вирішення цього рівняння ми вже виписували
тут φ o− максимальне відхилення нитки, тобто амплітуда коливань. Для простоти вважатимемо, що початкова швидкість кульки дорівнює нулю.
Період малих коливань маятника виражається через кругову частоту 
Оскільки малі коливання математичного маятника є гармонічними, їх період не залежить від амплітуди. Цей факт був експериментально відзначений ще Г. Галілеєм. При великих кутах відхилення період коливань математичного маятника трохи зростає.
Зазначимо, що період коливань математичного маятника не залежить також від маси кульки – пригадайте, прискорення вільного падіння, а також інші характеристики руху тіла в полі тяжіння Землі також не залежать від маси тіла (якщо, звичайно, нехтувати опором повітря).
Формула (6) може бути використана та використовується для експериментального визначення прискорення вільного падіння. Довжина нитки та період коливань досить просто виміряти експериментально, потім за допомогою формули (6) можна розрахувати прискорення вільного падіння.
Спробуємо описати рух математичного маятника за допомогою закону збереження механічної енергії. Кінетична енергія кульки виражається формулою 
Нульовий рівень відліку потенційної енергії сумісний із точкою підвісу нитки, тоді потенційна енергія кульки дорівнює ![]()
Рівняння закону збереження механічної енергії (з урахуванням початкових умов) має вигляд 
Це рівняння також є рівнянням гармонійних коливань. Але, якщо ми знову вважатимемо кути відхилення маятника малими і скористаємося наближеною формулою 
то рівняння (7) перейде в рівняння гармонійних коливань 
або 
де зазначено Ω = √(g/l)− кругова частота коливань, що збігається з отриманою з динамічного рівняння (2).
Звичайно, такий збіг не є випадковим – фактично в обох підходах ми використовували те саме наближення малих кутів відхилення.
1 В принципі, можна використовувати і рівняння динаміки поступального руху, але підхід, що використовується тут, є кращим, так як траєкторією руху точки є дуга кола.
2 Ми вибрали позначення Ω (це теж «омега», тільки заголовна) для власної частоти малих коливань, щоб традиційне позначення ω − залишити за кутовою швидкістю руху кульки, яка буде фігурувати в наших міркуваннях.
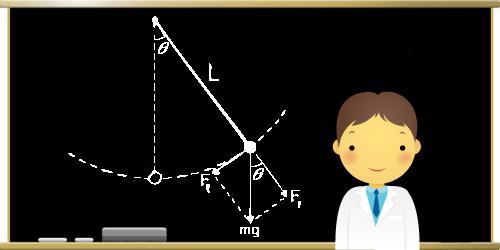
Математичним маятником називають тіло невеликих розмірів, підвішене на тонкій нерозтяжній нитці, маса якої дуже мала в порівнянні з масою тіла. У положенні рівноваги, коли маятник висить по схилу, сила тяжіння врівноважується силою натягу нитки. F τ = - mg sin φ (рис. 2.3.1). Знак «мінус» у цій формулі означає, що дотична складова спрямована у бік, протилежний відхиленню маятника.
Якщо позначити через xлінійне усунення маятника від положення рівноваги по дузі кола радіусу l, то його кутове зміщення дорівнюватиме φ = x / l. Другий закон Ньютона, записаний для проекцій векторів прискорення та сили на напрям дотичної, дає:
![]()
Це співвідношення показує, що математичний маятник є складною нелінійнусистему, оскільки сила, що прагне повернути маятник у положення рівноваги, пропорційна не зсуву x, а
Тільки у випадкумалих коливань , коли наближеноможна замінити наматематичний маятник є гармонічним осцилятором, Т. е. Системою, здатною здійснювати гармонійні коливання. Майже таке наближення справедливе для кутів порядку 15-20°; при цьому величина відрізняється не більше ніж на 2 %. Коливання маятника при великих амплітудах є гармонійними.
Для малих коливань математичного маятника другий закон Ньютона записується як
![]()
Таким чином, тангенціальне прискорення aτ маятника пропорційно його зсуву x, взятий зі зворотним знаком. Це якраз та умова, за якої система є гармонічним осцилятором. За загальним правилом для всіх систем, здатних здійснювати вільні гармонічні коливання, модуль коефіцієнта пропорційності між прискоренням та усуненням із положення рівноваги дорівнює квадрату кругової частоти:

Ця формула висловлює власну частоту малих коливань математичного маятника .
Отже,

Будь-яке тіло, насаджене на горизонтальну вісь обертання, здатне здійснювати в полі тяжіння вільні коливання і, отже, є маятником. Такий маятник прийнято називати фізичним (Рис. 2.3.2). Він відрізняється від математичного лише розподілом мас. У положенні стійкої рівноваги центр мас Cфізичного маятника знаходиться нижче осі обертання на вертикалі, що проходить через вісь. При відхиленні маятника на кут виникає момент сили тяжіння, що прагне повернути маятник в положення рівноваги:
|
M = -(mg sin φ) d. |
Тут d- відстань між віссю обертання та центром мас C.
|
|
|
Малюнок 2.3.2. Фізичний маятник |

Знак «мінус» у цій формулі, як завжди, означає, що момент сил прагне повернути маятник у напрямі, протилежному його відхилення від положення рівноваги. Як і у випадку математичного маятника, що повертає момент Mпропорційний. Це означає, що тільки при малих кутах, коли фізичний маятник здатний здійснювати вільні гармонічні коливання. У разі малих коливань
![]()
і другий закон Ньютона для фізичного маятника набуває вигляду
де ε - кутове прискорення маятника, I- момент інерції маятника щодо осі обертання O. Модуль коефіцієнта пропорційності між прискоренням і усуненням дорівнює квадрату кругової частоти:

Тут ω 0 - власна частота малих коливань фізичного маятника .
Отже,

Суворіший висновок формул для ω 0 і Tможна зробити, якщо взяти до уваги математичний зв'язок між кутовим прискоренням та кутовим зміщенням: кутове прискорення ε є другою похідною кутового зміщення φ за часом:
![]()
Тому рівняння, яке виражає другий закон Ньютона для фізичного маятника, можна записати у вигляді
![]()
Це рівняння вільних гармонійних коливань.
Коефіцієнт у цьому рівнянні має значення квадрата кругової частоти вільних гармонійних коливань фізичного маятника.
По теоремі про паралельне перенесення осі обертання (теорема Штейнера) момент інерції Iможна висловити через момент інерції ICщодо осі, що проходить через центр мас Cмаятника та паралельної осі обертання:
![]()
Остаточно для кругової частоти 0 вільних коливань фізичного маятника виходить вираз:

Зкриншотквестапро визначенняитипланети