Pendule mathématique : période, accélération et formules. Vibrations gratuites. Pendule mathématique
Un système mécanique constitué d'un point matériel (corps) suspendu à un fil inextensible en apesanteur (sa masse est négligeable par rapport au poids du corps) dans un champ gravitationnel uniforme est appelé un pendule mathématique (un autre nom est un oscillateur). Il existe d'autres types de cet appareil. Au lieu d'un fil, une tige en apesanteur peut être utilisée. Un pendule mathématique peut révéler clairement l'essence de nombreux phénomènes intéressants. Lorsque l’amplitude de la vibration est faible, son mouvement est appelé harmonique.
Aperçu du système mécanique
La formule de la période d'oscillation de ce pendule a été dérivée du scientifique néerlandais Huygens (1629-1695). Ce contemporain de I. Newton était très intéressé par ce système mécanique. En 1656, il crée la première horloge à mécanisme pendulaire. Ils mesuraient le temps avec une précision exceptionnelle pour ces époques-là. Cette invention devient une étape majeure dans le développement des expériences physiques et des activités pratiques.
Si le pendule est en position d'équilibre (suspendu verticalement), il sera équilibré par la force de tension du fil. Un pendule plat sur fil inextensible est un système à deux degrés de liberté avec couplage. Lorsque vous changez un seul composant, les caractéristiques de toutes ses pièces changent. Ainsi, si le filetage est remplacé par une tige, alors ce système mécanique n'aura qu'1 degré de liberté. Quelles propriétés possède un pendule mathématique ? Dans ce système le plus simple, le chaos surgit sous l’influence de perturbations périodiques. Dans le cas où le point de suspension ne bouge pas mais oscille, le pendule prend une nouvelle position d'équilibre. Avec des oscillations rapides de haut en bas, ce système mécanique acquiert une position stable « à l’envers ». Il a aussi son propre nom. C'est ce qu'on appelle le pendule Kapitsa.
Propriétés d'un pendule

Le pendule mathématique possède des propriétés très intéressantes. Tous sont confirmés par des lois physiques connues. La période d'oscillation de tout autre pendule dépend de diverses circonstances, telles que la taille et la forme du corps, la distance entre le point de suspension et le centre de gravité et la répartition de la masse par rapport à ce point. C'est pourquoi déterminer la période de suspension d'un corps est une tâche assez difficile. Il est beaucoup plus facile de calculer la période d'un pendule mathématique, dont la formule sera donnée ci-dessous. À la suite d’observations de systèmes mécaniques similaires, les modèles suivants peuvent être établis :
Si, tout en conservant la même longueur du pendule, on suspend des poids différents, alors la période de leurs oscillations sera la même, bien que leurs masses varient considérablement. Par conséquent, la période d'un tel pendule ne dépend pas de la masse de la charge.
Si, lors du démarrage du système, le pendule n'est pas dévié selon des angles pas trop grands, mais différents, alors il commencera à osciller avec la même période, mais avec des amplitudes différentes. Tant que les écarts par rapport au centre d'équilibre ne sont pas trop importants, les vibrations dans leur forme seront assez proches des vibrations harmoniques. La période d'un tel pendule ne dépend en aucun cas de l'amplitude oscillatoire. Cette propriété d'un système mécanique donné est appelée isochronisme (traduit du grec « chronos » - temps, « isos » - égal).
Période d'un pendule mathématique
Cet indicateur représente la période. Malgré la formulation complexe, le processus lui-même est très simple. Si la longueur du fil d'un pendule mathématique est L et que l'accélération de la chute libre est g, alors cette valeur est égale à :
La période des petites oscillations naturelles ne dépend en aucun cas de la masse du pendule et de l'amplitude des oscillations. Dans ce cas, le pendule se déplace comme un pendule mathématique avec une longueur donnée.
Oscillations d'un pendule mathématique

Un pendule mathématique oscille, qui peut être décrit par une simple équation différentielle :
x + ω2 péché x = 0,
où x (t) est une fonction inconnue (c'est l'angle de déviation par rapport à la position d'équilibre inférieure à l'instant t, exprimé en radians) ; ω est une constante positive, déterminée à partir des paramètres du pendule (ω = √g/L, où g est l'accélération de la gravité et L est la longueur du pendule mathématique (suspension).
L'équation des petites vibrations proches de la position d'équilibre (équation harmonique) ressemble à ceci :
x + ω2 péché x = 0
Mouvements oscillatoires d'un pendule
Un pendule mathématique, qui effectue de petites oscillations, se déplace le long d'une sinusoïde. L'équation différentielle du second ordre répond à toutes les exigences et paramètres d'un tel mouvement. Pour déterminer la trajectoire, il est nécessaire de régler la vitesse et les coordonnées, à partir desquelles des constantes indépendantes sont ensuite déterminées :
x = Un péché (θ 0 + ωt),
où θ 0 est la phase initiale, A est l'amplitude d'oscillation, ω est la fréquence cyclique déterminée à partir de l'équation du mouvement.
Pendule mathématique (formules pour grandes amplitudes)
Ce système mécanique, qui oscille avec une amplitude importante, est soumis à des lois de mouvement plus complexes. Pour un tel pendule ils sont calculés selon la formule :
péché x/2 = u * sn(ωt/u),
où sn est le sinus de Jacobi, qui pour toi< 1 является периодической функцией, а при малых u он совпадает с простым тригонометрическим синусом. Значение u определяют следующим выражением:
u = (ε + ω2)/2ω2,
où ε = E/mL2 (mL2 est l’énergie du pendule).
La période d'oscillation d'un pendule non linéaire est déterminée à l'aide de la formule :
où Ω = π/2 * ω/2K(u), K est l'intégrale elliptique, π - 3,14.

Mouvement d'un pendule le long d'une séparatrice
Une séparatrice est la trajectoire d'un système dynamique qui possède un espace de phase bidimensionnel. Un pendule mathématique se déplace le long de celui-ci de manière non périodique. À un instant infiniment lointain, il tombe de sa position la plus haute sur le côté à vitesse nulle, puis la gagne progressivement. Il finit par s'arrêter et revient à sa position initiale.
Si l'amplitude des oscillations du pendule se rapproche du nombre π , cela indique que le mouvement sur le plan de phase se rapproche du séparateur. Dans ce cas, sous l’influence d’une faible force motrice périodique, le système mécanique présente un comportement chaotique.
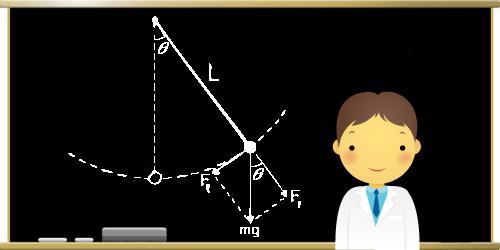
Lorsqu'un pendule mathématique s'écarte de la position d'équilibre avec un certain angle φ, une force de gravité tangentielle Fτ = -mg sin φ apparaît. Le signe moins signifie que cette composante tangentielle est dirigée dans le sens opposé à la déviation du pendule. Lorsqu'on note x le déplacement du pendule le long d'un arc de cercle de rayon L, son déplacement angulaire est égal à φ = x/L. La deuxième loi, destinée aux projections et à la force, donnera la valeur souhaitée :
mg τ = Fτ = -mg sin x/L
Sur la base de cette relation, il est clair que ce pendule est un système non linéaire, puisque la force qui tend à le ramener à la position d'équilibre est toujours proportionnelle non pas au déplacement x, mais au sin x/L.
Ce n'est que lorsqu'un pendule mathématique effectue de petites oscillations qu'il est un oscillateur harmonique. Autrement dit, il devient un système mécanique capable d’effectuer des oscillations harmoniques. Cette approximation est pratiquement valable pour des angles de 15-20°. Les oscillations d'un pendule de grande amplitude ne sont pas harmoniques.
Loi de Newton pour les petites oscillations d'un pendule

Si un système mécanique donné effectue de petites oscillations, la 2ème loi de Newton ressemblera à ceci :
mg τ = Fτ = -m* g/L* x.
Sur cette base, nous pouvons conclure qu'un pendule mathématique est proportionnel à son déplacement avec un signe moins. C’est la condition grâce à laquelle le système devient un oscillateur harmonique. Le module du coefficient de proportionnalité entre déplacement et accélération est égal au carré de la fréquence circulaire :
ω02 = g/L ; ω0 = √g/L.
Cette formule reflète la fréquence naturelle des petites oscillations de ce type de pendule. Basé sur ceci,
T = 2π/ ω0 = 2π√ g/L.
Calculs basés sur la loi de conservation de l'énergie
Les propriétés d'un pendule peuvent également être décrites à l'aide de la loi de conservation de l'énergie. Il faut tenir compte du fait que le pendule dans le champ gravitationnel est égal à :
E = mg∆h = mgL(1 - cos α) = mgL2sin2 α/2
Le total est égal au potentiel cinétique ou maximum : Epmax = Ekmsx = E
Une fois la loi de conservation de l'énergie écrite, prenez la dérivée des côtés droit et gauche de l'équation :
Puisque la dérivée de quantités constantes est égale à 0, alors (Ep + Ek)" = 0. La dérivée de la somme est égale à la somme des dérivées :
Ep" = (mg/L*x2/2)" = mg/2L*2x*x" = mg/L*v + Ek" = (mv2/2) = m/2(v2)" = m/ 2* 2v*v" = mv* α,
ainsi:
Mg/L*xv + mva = v (mg/L*x + mα) = 0.
Sur la base de la dernière formule, nous trouvons : α = - g/L*x.
Application pratique d'un pendule mathématique
L'accélération varie selon la latitude car la densité de la croûte terrestre n'est pas la même sur toute la planète. Là où se trouvent des roches de densité plus élevée, celle-ci sera légèrement plus élevée. L'accélération d'un pendule mathématique est souvent utilisée pour l'exploration géologique. Il est utilisé pour rechercher divers minéraux. En comptant simplement le nombre d'oscillations d'un pendule, on peut détecter du charbon ou du minerai dans les entrailles de la Terre. Cela est dû au fait que ces fossiles ont une densité et une masse supérieures à celles des roches meubles sous-jacentes.

Le pendule mathématique a été utilisé par des scientifiques aussi remarquables que Socrate, Aristote, Platon, Plutarque et Archimède. Beaucoup d'entre eux pensaient que ce système mécanique pouvait influencer le destin et la vie d'une personne. Archimède utilisait un pendule mathématique dans ses calculs. De nos jours, de nombreux occultistes et médiums utilisent ce système mécanique pour accomplir leurs prophéties ou rechercher des personnes disparues.
Le célèbre astronome et naturaliste français K. Flammarion a également utilisé un pendule mathématique pour ses recherches. Il a affirmé qu'avec son aide, il était capable de prédire la découverte d'une nouvelle planète, l'apparition de la météorite Tunguska et d'autres événements importants. Pendant la Seconde Guerre mondiale, un institut spécialisé du pendule opérait en Allemagne (Berlin). Aujourd'hui, l'Institut de parapsychologie de Munich mène des recherches similaires. Les employés de cet établissement appellent leur travail avec le pendule « radiesthésie ».
10.4. Loi de conservation de l'énergie lors des oscillations harmoniques
10.4.1. Économies d'énergie à vibrations harmoniques mécaniques
Conservation de l'énergie lors des oscillations d'un pendule mathématique
Lors des vibrations harmoniques, l'énergie mécanique totale du système est conservée (reste constante).
Énergie mécanique totale d'un pendule mathématique
E = W k + W p ,
où W k est l'énergie cinétique, W k = = mv 2 /2 ; W p - énergie potentielle, W p = mgh ; m est la masse de la charge ; g - module d'accélération de chute libre ; v - module de vitesse de chargement ; h est la hauteur de la charge au-dessus de la position d'équilibre (Fig. 10.15).
Lors des oscillations harmoniques, un pendule mathématique passe par un certain nombre d'états successifs, il est donc conseillé de considérer l'énergie d'un pendule mathématique dans trois positions (voir Fig. 10.15) :
Riz. 10h15
1) dans Position d'équilibre
l'énergie potentielle est nulle ; L'énergie totale coïncide avec l'énergie cinétique maximale :
E = W k max ;
2) dans situation d'urgence(2) le corps est élevé au-dessus du niveau initial jusqu'à la hauteur maximale h max, donc l'énergie potentielle est également maximale :
W p max = m g h max ;
l'énergie cinétique est nulle ; l'énergie totale coïncide avec l'énergie potentielle maximale :
E = W p max ;
3) dans position intermédiaire(3) le corps a une vitesse instantanée v et est élevé au-dessus du niveau initial jusqu'à une certaine hauteur h, donc l'énergie totale est la somme
E = m v 2 2 + m g h ,
où mv 2 /2 est l'énergie cinétique ; mgh - énergie potentielle ; m est la masse de la charge ; g - module d'accélération de chute libre ; v - module de vitesse de chargement ; h - hauteur de levage de la charge au-dessus de la position d'équilibre.
Lors des oscillations harmoniques d'un pendule mathématique, l'énergie mécanique totale est conservée :
E = const.
Les valeurs de l'énergie totale du pendule mathématique dans ses trois positions sont reflétées dans le tableau. 10.1.
| № | Position | Wp | Semaine | E = W p + W k |
|---|---|---|---|---|
| 1 | Équilibre | 0 | m v max 2 / 2 | m v max 2 / 2 |
| 2 | Extrême | mgh max | 0 | mgh max |
| 3 | Intermédiaire (instantané) | mgh | mv2/2 | mv 2 /2 + mgh |
Les valeurs de l'énergie mécanique totale présentées dans la dernière colonne du tableau. 10.1, ont des valeurs égales pour n'importe quelle position du pendule, ce qui est une expression mathématique :
m v max 2 2 = m g h max ;
m v max 2 2 = m v 2 2 + m g h ;
m g h max = m v 2 2 + m g h ,
où m est la masse de la charge ; g - module d'accélération de chute libre ; v est le module de la vitesse instantanée de la charge en position 3 ; h - hauteur de levage de la charge au-dessus de la position d'équilibre en position 3 ; v max - module de la vitesse maximale de la charge en position 1 ; h max - hauteur maximale de levage de la charge au-dessus de la position d'équilibre en position 2.
Angle de déviation du fil le pendule mathématique par rapport à la verticale (Fig. 10.15) est déterminé par l'expression
cos α = l − hl = 1 − hl ,
où l est la longueur du fil ; h - hauteur de levage de la charge au-dessus de la position d'équilibre.
Angle maximal l'écart α max est déterminé par la hauteur maximale de levage de la charge au-dessus de la position d'équilibre h max :
cos α max = 1 − h max l .
Exemple 11. La période des petites oscillations d'un pendule mathématique est de 0,9 s. Quel est l'angle maximum auquel le fil s'écartera de la verticale si, passant la position d'équilibre, la balle se déplace à une vitesse de 1,5 m/s ? Il n’y a aucune friction dans le système.
Solution . La figure montre deux positions du pendule mathématique :

- position d'équilibre 1 (caractérisée par la vitesse maximale de la balle v max) ;
- position extrême 2 (caractérisée par la hauteur maximale de levage de la boule h max au-dessus de la position d'équilibre).
L'angle requis est déterminé par l'égalité
cos α max = l − h max l = 1 − h max l ,
où l est la longueur du fil du pendule.
On trouve la hauteur maximale de la boule du pendule au-dessus de la position d'équilibre à partir de la loi de conservation de l'énergie mécanique totale.
L'énergie totale du pendule en position d'équilibre et en position extrême est déterminée par les formules suivantes :
- en position d'équilibre -
E 1 = m v max 2 2,
où m est la masse de la boule du pendule ; v max - module de la vitesse de la balle en position d'équilibre (vitesse maximale), v max = 1,5 m/s ;
- en position extrême -
E 2 = mgh max,
où g est le module d'accélération gravitationnelle ; h max est la hauteur maximale de la balle qui s'élève au-dessus de la position d'équilibre.
Loi de conservation de l'énergie mécanique totale :
m v max 2 2 = m g h max .
Exprimons à partir d'ici la hauteur maximale de montée de la balle au-dessus de la position d'équilibre :
h max = v max 2 2 g .
Nous déterminons la longueur du fil à partir de la formule de la période d'oscillation d'un pendule mathématique
T = 2 π l g ,
ceux. longueur du filetage
je = T 2 g 4 π 2 .
Remplaçons h max et l dans l'expression du cosinus de l'angle souhaité :
cos α max = 1 − 2 π 2 v max 2 g 2 T 2
et effectuer le calcul en tenant compte de l'égalité approximative π 2 = 10 :
cos α max = 1 − 2 ⋅ 10 ⋅ (1,5) 2 10 2 ⋅ (0,9) 2 = 0,5 .
Il s'ensuit que l'angle de déflexion maximum est de 60°.
À proprement parler, à un angle de 60°, les oscillations de la balle ne sont pas faibles et il est illégal d'utiliser la formule standard pour la période d'oscillation d'un pendule mathématique.
Conservation de l'énergie lors des oscillations d'un pendule à ressort
Énergie mécanique totale d'un pendule à ressort se compose d’énergie cinétique et d’énergie potentielle :

E = W k + W p ,
où W k est l'énergie cinétique, W k = mv 2 /2 ; W p - énergie potentielle, W p = k (Δx ) 2 /2 ; m est la masse de la charge ; v - module de vitesse de chargement ; k est le coefficient de rigidité (élasticité) du ressort ; Δx - déformation (tension ou compression) du ressort (Fig. 10.16).
Dans le Système international d'unités, l'énergie d'un système oscillatoire mécanique est mesurée en joules (1 J).
Lors des oscillations harmoniques, le pendule à ressort passe par un certain nombre d'états successifs, il est donc conseillé de considérer l'énergie du pendule à ressort dans trois positions (voir Fig. 10.16) :
1) dans Position d'équilibre(1) la vitesse du corps a une valeur maximale v max, donc l'énergie cinétique est également maximale :
W k max = m v max 2 2 ;
l'énergie potentielle du ressort est nulle, puisque le ressort n'est pas déformé ; L'énergie totale coïncide avec l'énergie cinétique maximale :
E = W k max ;
2) dans situation d'urgence(2) le ressort a une déformation maximale (Δx max), donc l'énergie potentielle a également une valeur maximale :
W p max = k (Δ x max) 2 2 ;
l'énergie cinétique du corps est nulle ; l'énergie totale coïncide avec l'énergie potentielle maximale :
E = W p max ;
3) dans position intermédiaire(3) le corps a une vitesse instantanée v, le ressort a une certaine déformation à ce moment (Δx), donc l'énergie totale est la somme
E = m v 2 2 + k (Δ x) 2 2 ,
où mv 2 /2 est l'énergie cinétique ; k (Δx) 2 /2 - énergie potentielle ; m est la masse de la charge ; v - module de vitesse de chargement ; k est le coefficient de rigidité (élasticité) du ressort ; Δx - déformation (tension ou compression) du ressort.
Lorsque la charge d’un pendule à ressort est déplacée de sa position d’équilibre, elle est sollicitée par restaurer la force, dont la projection sur la direction de déplacement du pendule est déterminée par la formule
Fx = −kx ,
où x est le déplacement de la charge du pendule du ressort depuis la position d'équilibre, x = ∆x, ∆x est la déformation du ressort ; k est le coefficient de rigidité (élasticité) du ressort pendulaire.
Lors des oscillations harmoniques d'un pendule à ressort, l'énergie mécanique totale est conservée :
E = const.
Les valeurs de l'énergie totale du pendule à ressort dans ses trois positions sont reflétées dans le tableau. 10.2.
| № | Position | Wp | Semaine | E = W p + W k |
|---|---|---|---|---|
| 1 | Équilibre | 0 | m v max 2 / 2 | m v max 2 / 2 |
| 2 | Extrême | k (Δx max) 2 /2 | 0 | k (Δx max) 2 /2 |
| 3 | Intermédiaire (instantané) | k (Δx ) 2 /2 | mv2/2 | mv 2 /2 + k (Δx ) 2 /2 |
Les valeurs de l'énergie mécanique totale présentées dans la dernière colonne du tableau ont des valeurs égales pour n'importe quelle position du pendule, ce qui est une expression mathématique loi de conservation de l'énergie mécanique totale:
m v max 2 2 = k (Δ x max) 2 2 ;
m v max 2 2 = m v 2 2 + k (Δ x) 2 2 ;
k (Δ x max) 2 2 = m v 2 2 + k (Δ x) 2 2 ,
où m est la masse de la charge ; v est le module de la vitesse instantanée de la charge en position 3 ; Δx - déformation (tension ou compression) du ressort en position 3 ; v max - module de la vitesse maximale de la charge en position 1 ; Δx max - déformation maximale (tension ou compression) du ressort en position 2.
Exemple 12. Un pendule à ressort effectue des oscillations harmoniques. Combien de fois son énergie cinétique est-elle supérieure à son énergie potentielle au moment où le déplacement du corps par rapport à la position d'équilibre est d'un quart de l'amplitude ?
Solution . Comparons deux positions du pendule à ressort :
- position extrême 1 (caractérisée par le déplacement maximal de la charge pendulaire par rapport à la position d'équilibre x max) ;
- position intermédiaire 2 (caractérisée par des valeurs intermédiaires de déplacement par rapport à la position d'équilibre x et de vitesse v →).
L'énergie totale du pendule dans les positions extrême et intermédiaire est déterminée par les formules suivantes :
- en position extrême -
E 1 = k (Δ x max) 2 2,
où k est le coefficient de rigidité (élasticité) du ressort ; ∆x max - amplitude des oscillations (déplacement maximum par rapport à la position d'équilibre), ∆x max = A ;
- en position intermédiaire -
E 2 = k (Δ x) 2 2 + m v 2 2,
où m est la masse de la charge pendulaire ; ∆x - déplacement de la charge depuis la position d'équilibre, ∆x = A /4.
La loi de conservation de l'énergie mécanique totale pour un pendule à ressort a la forme suivante :
k (Δ x max) 2 2 = k (Δ x) 2 2 + m v 2 2 .
Divisons les deux côtés de l'égalité écrite par k (∆x) 2 /2 :
(Δ x max Δ x) 2 = 1 + m v 2 2 ⋅ 2 k Δ x 2 = 1 + W k W p ,
où W k est l'énergie cinétique du pendule en position intermédiaire, W k = mv 2 /2 ; W p - énergie potentielle du pendule en position intermédiaire, W p = k (∆x) 2 /2.
Exprimons le rapport énergétique requis à partir de l'équation :
W k W p = (Δ x max Δ x) 2 − 1
et calculons sa valeur :
W k W p = (A A / 4) 2 − 1 = 16 − 1 = 15 .
A l'instant indiqué, le rapport des énergies cinétique et potentielle du pendule est de 15.
OBJECTIF : tester expérimentalement la loi de conservation de l'énergie du mouvement de translation-rotation sur un pendule de Maxwell ; déterminer la vitesse de mouvement de translation du pendule en utilisant les relations énergétiques et cinématiques et les comparer.
ÉQUIPEMENT : Pendule Maxwell avec anneaux remplaçables ; chronomètre électronique.
LES BASES DE LA THÉORIE
La mesure la plus générale du mouvement de la matière est son énergie. En mécanique, c'est l'énergie mécanique correspondant au mouvement mécanique des corps. Il existe deux types d'énergie mécanique : cinétique et potentielle.
Énergie potentielle. Définition de l'énergie position relative les corps en interaction et dépendant uniquement des coordonnées sont appelés potentiels. Emploi UN 12 , accompli par des forces conservatrices lors du transfert d'un système d'un état à un autre, est égal à la perte d'énergie potentielle dans ces états .
A 12 = W 1 - W 2, (1)
Où W 1 Et W 2 respectivement, l'énergie potentielle du système dans les états 1 et 2.
Le type spécifique d’énergie potentielle dépend de la nature du champ de force. Dans le domaine de la gravité, l'énergie potentielle d'un corps de masse m a la forme :
W = m g h , (2)
Où g accélération de la chute libre ;
h hauteur mesurée à partir du niveau où l'énergie potentielle W=0.
Énergie cinétique. Il s’agit de l’énergie qu’un corps (ou un système de corps) possède en raison de son mouvement. Si un corps avance à une vitesse v et tourne simultanément autour d'un certain axe avec une vitesse angulaire , alors l'énergie cinétique totale de son mouvement est égale à :
Où m-poids;
jemoment d'inertie.
Comme vous pouvez le voir, lors d'un mouvement de rotation, le rôle de la vitesse linéaire est joué par la vitesse angulaire, et le rôle de la masse est joué par le moment d'inertie. Élan je dépend non seulement de la masse, mais aussi de la répartition de cette masse par rapport à l'axe de rotation. Signification je car certains corps de forme géométrique régulière (longue tige, disque, boule, cylindre) sont donnés dans les manuels du cours de physique générale.
Loi de conservation de l'énergie. L'énergie mécanique d'un système fermé de corps entre lesquels agissent des forces conservatrices reste constante. Dans de tels systèmes, lorsqu’un corps bouge, l’énergie cinétique est convertie en énergie potentielle et vice versa, et l’énergie totale reste constante. (Les forces conservatrices incluent les forces gravitationnelles, élastiques, coulombiennes, etc. Les forces non conservatrices sont les forces de frottement, de résistance, de déformations inélastiques.).
L'énergie mécanique est également conservée dans les systèmes ouverts si les forces externes n'effectuent pas de travail, puisque la mesure de l'énergie est le travail effectué.
PROCÉDURE EXPÉRIMENTALE
La loi de conservation de l'énergie pour le mouvement de translation-rotation d'un corps est testée à l'aide d'un pendule de Maxwell. Un pendule de Maxwell est un disque monté sur un axe. L'axe, quant à lui, est suspendu à deux fils, fixés aux extrémités supérieures à des supports.
Ces fils peuvent être enroulés autour d'un axe, et lorsqu'ils sont détordus, le pendule effectue un mouvement de translation-rotation, c'est-à-dire monte et descend, en tournant.
Au cours de l’expérience, deux états principaux ont été identifiés. A l'état de 1 pendule de masse m est au dessus h. L'énergie mécanique du système dans cet état est égale uniquement à l'énergie potentielle :
E 1 = W 1 = m g h. (4)
Lâchons le pendule. Sous l'action des forces de gravité et de tension résultantes du fil, celui-ci commence à tomber (mouvement vers l'avant) et les forces de tension des fils le conduisent à un mouvement de rotation.

Riz. 1. Vue générale du pendule de Maxwell.
T- force de tension du fil ; F g - la gravité.
Dans l'état 2, un pendule descendu d'une hauteur h, avance avec rapidité v, en tournant autour d'un axe passant par le centre de masse avec une vitesse angulaire Par conséquent, l'énergie mécanique du système à l'état 2 est constituée des énergies cinétiques du mouvement de translation et de rotation :
 . (5)
. (5)
Dans un système sélectionné (un pendule dans un champ de gravité), la loi de conservation de l'énergie doit être satisfaite. La gravité est une force conservatrice. La tension du fil est une force extérieure. mais ça ne marche pas, parce que son point d'application reste en place lors d'une petite rotation du pendule. Ainsi:
 .
(6)
.
(6)
La vitesse de translation du pendule est liée à la vitesse angulaire par la relation
v = ·r, (7)
Où rrayon de l'axe du pendule.
Alors la formule (6) prendra la forme :
2gh = v 2 (1+I/mr 2). (8)
Et la vitesse de déplacement en translation du pendule prend le sens suivant :
 .
(9)
.
(9)
Pour vérifier la loi de conservation de l'énergie, calculons la vitesse d'une autre manière indépendante, en utilisant des relations cinématiques connues. Puisque le mouvement du pendule est uniformément accéléré, alors si pendant la chute t le pendule a passé son chemin h, son accélération est égale
une = 2h / t 2 . (dix)
D'où la vitesse de translation du pendule en fin de parcours :
v = un t = 2h/t. (onze)
La vitesse en (9) dépend du moment d'inertie du pendule, qui peut être modifié en installant différents anneaux sur le disque. Le moment d'inertie du pendule est défini comme
Je = Je 0 + JE D + JE K. (12)
Où je 0 - moment d'inertie de l'axe,
 - moment d'inertie du disque,
- moment d'inertie du disque,
 - moment d'inertie de l'anneau,
- moment d'inertie de l'anneau,
R. D , R. À- les rayons du disque et de l'anneau.
Le rayon de l'anneau est considéré comme la valeur moyenne entre les rayons intérieur et extérieur. Le rayon de l’axe du pendule étant bien inférieur au rayon du disque, le moment d’inertie de l’axe peut être négligé.
Schéma logique de la méthode.
Si la vitesse déterminée à partir de la loi de conservation de l'énergie selon la relation (9) est égale à la vitesse déterminée cinématiquement selon la formule (11), alors cela confirme la conservation de l'énergie pour le système sélectionné.
FIN DES TRAVAUX
1. Mesurez le temps de chute du pendule avec l'un des anneaux indiqués par l'enseignant.
2. Répétez les mesures 5 à 10 fois.
3. Mesurez la hauteur de chute et la hauteur de montée du pendule.
4. À l'aide d'un pied à coulisse, mesurez le diamètre de l'axe du pendule, le diamètre intérieur et extérieur de l'anneau.
RÉSULTATS DU TRAITEMENT
1. Calculez le temps de chute moyen
2. Calculez la vitesse v 1 selon la relation (11).
3. Calculez l'erreur de mesure de vitesse v 1 selon la règle de calcul de l'erreur pour les mesures indirectes.
4. Calculez le moment d'inertie du pendule avec l'anneau. Les masses du disque et de l'anneau y sont marquées.
5. Calculez la vitesse du pendule v 2 selon la relation (9).
6. Déterminer la mesure de l'écart = ( v 1 - v 2 )/ v 1 et comparer avec l'erreur relative v 1 = v 1 / v 1 .
TÂCHE SUPPLÉMENTAIRE
Déterminez la perte d'énergie par la différence entre la hauteur de chute et la hauteur ultérieure de montée du pendule.
Calculez la force de friction efficace moyenne créant une perte d’énergie.
QUESTIONS DE CONTACT
1. Quels types d’énergie mécanique existe-t-il ? Donnez leurs définitions.
2. Formuler la loi de conservation de l'énergie mécanique du système et les conditions de sa mise en œuvre.
3. Décrivez la transformation énergétique du pendule de Maxwell.
4. Quel est le moment d'inertie d'un corps ? Quel est le moment d'inertie du disque ou de l'anneau ?
5. Comment est déterminée la vitesse du mouvement de translation d'un pendule de Maxwell ?
Une petite boule suspendue à un fil léger et inextensible est capable de gratuit mouvement oscillatoire (Fig. 598).
riz. 598
Pour décrire le mouvement du pendule, nous considérerons la bille comme un point matériel et négligerons la masse du fil et la résistance de l'air. Ce modèle s'appelle pendule mathématique.
Comme coordonnée décrivant la position de la balle, on choisit l'angle de déviation du fil par rapport à la verticale φ
. Pour décrire le changement de cette coordonnée, il convient d'utiliser l'équation de la dynamique du mouvement de rotation ![]()
Où J = ml2− moment d'inertie du système, ε = Δω/Δt− accélération angulaire du corps (dérivée seconde de l'angle de rotation), M− moment total des forces extérieures agissant sur le système 1. La balle est soumise à l'action de la gravité et de la tension du fil. Moment de tension du fil N par rapport au point de suspension est nul, donc l'équation (1) pour une balle suspendue prend la forme
ou ![]()
Cette équation décrit les oscillations d'un pendule, mais n'est pas une équation d'oscillations harmoniques, puisque le moment de force est proportionnel au sinus de l'angle de déviation, et non à l'angle lui-même. Cependant, si l'on considère que les angles de déviation sont petits (nous découvrirons de combien ils sont plus tard), nous pouvons utiliser la formule approximative péchéφ ≈ φ dans cette approximation, l'équation (3) se transforme en l'équation familière des oscillations harmoniques ![]()
Où Ω = √(g/l)− fréquence circulaire des petites oscillations du pendule 2. Nous avons déjà écrit la solution de cette équation
Ici φo− la déviation maximale du fil, c'est-à-dire l'amplitude des oscillations. Pour simplifier, nous supposerons que la vitesse initiale de la balle est nulle.
La période des petites oscillations d'un pendule est exprimée en termes de fréquence circulaire 
Les petites oscillations d'un pendule mathématique étant harmoniques, leur période ne dépend pas de l'amplitude. Ce fait a été constaté expérimentalement par G. Galileo. Aux grands angles de déviation, la période d'oscillation d'un pendule mathématique augmente légèrement.
Notez que la période d'oscillation d'un pendule mathématique ne dépend pas non plus de la masse de la balle - rappelez-vous que l'accélération de la chute libre, ainsi que d'autres caractéristiques du mouvement d'un corps dans le champ gravitationnel terrestre, ne dépendent pas non plus. sur la masse du corps (si, bien sûr, on néglige la résistance de l'air).
La formule (6) peut être et est utilisée pour déterminer expérimentalement l'accélération de la gravité. La longueur du fil et la période d'oscillation sont assez simples à mesurer expérimentalement, puis à l'aide de la formule (6) l'accélération de la chute libre peut être calculée.
Essayons de décrire le mouvement d'un pendule mathématique en utilisant la loi de conservation de l'énergie mécanique. L'énergie cinétique de la balle est exprimée par la formule 
Le niveau zéro de référence d'énergie potentielle est compatible avec le point de suspension du fil, alors l'énergie potentielle de la bille est égale à ![]()
L'équation de la loi de conservation de l'énergie mécanique (tenant compte des conditions initiales) a la forme 
Cette équation n’est pas non plus une équation de vibrations harmoniques. Mais, si l'on considère à nouveau les angles de déviation du pendule petits et utilisons la formule approximative 
alors l'équation (7) se transformera en l'équation des oscillations harmoniques 
ou 
où indiqué Ω = √(g/l)− fréquence circulaire des oscillations, coïncidant avec celle obtenue à partir de l'équation dynamique (2).
Bien entendu, cette coïncidence n’est pas fortuite : en fait, dans les deux approches, nous avons utilisé la même approximation des petits angles de déviation.
1 En principe, il est possible d’utiliser des équations de la dynamique du mouvement de translation, mais l’approche utilisée ici est préférable, puisque la trajectoire du mouvement du point est un arc de cercle.
2 Nous avons choisi la désignation Ω (c'est aussi « oméga », en majuscules seulement) pour la fréquence propre des petites oscillations, de sorte que la désignation traditionnelle ω − soit laissée de côté pour la vitesse angulaire de la balle, qui apparaîtra plus loin dans notre raisonnement.
Pendule mathématique appelé petit corps suspendu à un fil fin et inextensible dont la masse est négligeable par rapport à la masse du corps. En position d'équilibre, lorsque le pendule est suspendu à l'aplomb, la force de gravité est équilibrée par la force de tension du fil. Lorsque le pendule est dévié de la position d'équilibre d'un certain angle φ, une composante tangentielle de la force de gravité apparaît F τ = - mg sin φ (Fig. 2.3.1). Le signe moins dans cette formule signifie que la composante tangentielle est dirigée dans la direction opposée à la déviation du pendule.
Si on note par X déplacement linéaire du pendule depuis la position d'équilibre le long d'un arc de cercle de rayon je, alors son déplacement angulaire sera égal à φ = X / je. La deuxième loi de Newton, écrite pour les projections des vecteurs d'accélération et de force sur la direction de la tangente, donne :
![]()
Cette relation montre qu'un pendule mathématique est un complexe non linéaire système, puisque la force tendant à ramener le pendule à la position d'équilibre n'est pas proportionnelle au déplacement X, UN
Seulement au cas oùpetites fluctuations , quand environpeut être remplacé parun pendule mathématique est un oscillateur harmonique, c'est-à-dire un système capable d'effectuer des oscillations harmoniques. En pratique, cette approximation est valable pour des angles de l'ordre de 15-20° ; dans ce cas, la valeur ne diffère pas de plus de 2 %. Les oscillations d'un pendule à grande amplitude ne sont pas harmoniques.
Pour les petites oscillations d'un pendule mathématique, la deuxième loi de Newton s'écrit sous la forme
![]()
Ainsi, l’accélération tangentielle unτ du pendule est proportionnel à son déplacement X, pris avec le signe opposé. C’est précisément la condition dans laquelle le système est un oscillateur harmonique. Selon la règle générale, pour tous les systèmes capables d'effectuer des oscillations harmoniques libres, le module du coefficient de proportionnalité entre l'accélération et le déplacement par rapport à la position d'équilibre est égal au carré de la fréquence circulaire :

Cette formule exprime fréquence naturelle des petites oscillations d'un pendule mathématique .
Ainsi,

Tout corps monté sur un axe de rotation horizontal est capable d'oscillations libres dans un champ gravitationnel et est donc également un pendule. Un tel pendule est généralement appelé physique (Fig. 2.3.2). Il ne diffère du mathématique que par la répartition des masses. Dans une position d'équilibre stable, le centre de masse C le pendule physique est situé en dessous de l'axe de rotation O sur la verticale passant par l'axe. Lorsque le pendule est dévié d'un angle φ, un moment de gravité apparaît, tendant à ramener le pendule à la position d'équilibre :
|
M = -(mg sinφ) d. |
Ici d- distance entre l'axe de rotation et le centre de masse C.
|
|
|
Graphique 2.3.2. Pendule physique |

Le signe moins dans cette formule, comme d'habitude, signifie que le moment de force tend à faire tourner le pendule dans le sens opposé à son écart par rapport à la position d'équilibre. Comme dans le cas d'un pendule mathématique, le moment de retour M proportionnel Cela signifie que ce n'est qu'à de petits angles qu'un pendule physique est capable d'effectuer des oscillations harmoniques libres. En cas de petites fluctuations
![]()
et la deuxième loi de Newton pour un pendule physique prend la forme
où ε est l'accélération angulaire du pendule, je- moment d'inertie du pendule par rapport à l'axe de rotation Ô. Le module du coefficient de proportionnalité entre accélération et déplacement est égal au carré de la fréquence circulaire :

Ici ω 0 - fréquence naturelle des petites oscillations d'un pendule physique .
Ainsi,

Une dérivation plus rigoureuse des formules pour ω 0 et T peut être fait si l'on prend en compte la relation mathématique entre l'accélération angulaire et le déplacement angulaire : l'accélération angulaire ε est la dérivée seconde du déplacement angulaire φ par rapport au temps :
![]()
Par conséquent, l’équation exprimant la deuxième loi de Newton pour un pendule physique peut s’écrire sous la forme
![]()
C'est l'équation des vibrations harmoniques libres.
Le coefficient de cette équation a la signification du carré de la fréquence circulaire des oscillations harmoniques libres d'un pendule physique.
D’après le théorème de translation parallèle de l’axe de rotation (théorème de Steiner), le moment d’inertie je peut s'exprimer à travers le moment d'inertie jeC par rapport à un axe passant par le centre de masse C pendule et axe de rotation parallèle :
![]()
Enfin, pour la fréquence circulaire ω 0 des oscillations libres d'un pendule physique, on obtient l'expression suivante :

AVECcapture d'écranquêteà propos de la définitionilplanètes