Stromimpulse einer bestimmten Voreinstellung. Elektrische Impulse und ihre Parameter
Unter elektrischer Impuls die Abweichung der Spannung oder des Stroms von einem bestimmten konstanten Niveau (insbesondere von Null) verstehen, die für eine Zeit beobachtet wird, die kürzer oder vergleichbar ist mit der Dauer von Transienten in der Schaltung.
Wie bereits erwähnt, wird unter einem transienten Vorgang jede abrupte Änderung des stationären Zustands in einem elektrischen Stromkreis durch Einwirkung externer Signale oder ein Schalten innerhalb des Stromkreises selbst verstanden. Somit ist der transiente Prozess der Prozess des Übergangs eines elektrischen Stromkreises von einem stationären Zustand in einen anderen. Egal wie kurz dieser vorübergehende Prozess ist, er ist immer zeitlich begrenzt. Bei Schaltungen, bei denen die Lebensdauer des Einschwingvorgangs ungleich kürzer ist als die Dauer des externen Signals (Spannung oder Strom), wird der Betriebsmodus als stationär betrachtet und das externe Signal selbst für eine solche Schaltung ist nicht gepulst. Ein Beispiel hierfür wäre die Ansteuerung eines elektromagnetischen Relais.
Wenn die Dauer der im Stromkreis wirkenden Spannungs- oder Stromsignale der Dauer der Aufbauvorgänge entspricht, hat der Einschwingvorgang starker Einfluss auf Form und Parameter dieser Signale, so dass sie nicht ignoriert werden können. In diesem Fall fällt das Signal, das an den Stromkreis angelegt wird, meistens mit dem Zeitpunkt des Einschwingvorgangs zusammen (Abbildung 1.4). Der Betriebsmodus des Stromkreises während der Wirkung eines solchen Signals ist nicht stationär und sein Einfluss auf den Stromkreis ist impulsiv.
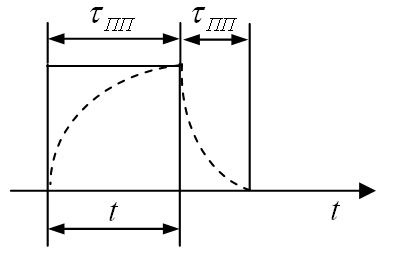
Abbildung 1.4. Die Beziehung zwischen Signaldauer und Dauer
Übergangsprozess:
ein) die Dauer des Übergangsprozesses ist viel kürzer als die Dauer
Signal ( pp<< t );
B) die Dauer des transienten Prozesses entspricht der Dauer
Signal ( τ пп ≈ t ).
Daraus folgt, dass das Konzept eines Impulses mit den Parametern einer bestimmten Schaltung verbunden ist und dass nicht für jede Schaltung das Signal als gepulst betrachtet werden kann.
Auf diese Weise, ein elektrischer Impuls für einen gegebenen Stromkreis ist die Spannung oder der Strom, die für eine Zeitdauer wirken, die der Dauer der Transienten in diesem Stromkreis entspricht. Es wird davon ausgegangen, dass zwischen zwei aufeinanderfolgenden Impulsen in der Schaltung ein ausreichender Zeitabstand liegen muss, der die Dauer des Einschwingvorgangs überschreitet. Andernfalls treten anstelle von Impulsen Signale mit komplexer Form auf (Abb. 1.5).
Abbildung 1.5. Komplexe elektrische Signale
Das Vorhandensein von Zeitintervallen verleiht dem Impulssignal eine charakteristische diskontinuierliche Struktur. Eine gewisse Konventionalität solcher Definitionen liegt in der Tatsache, dass der Etablierungsprozess theoretisch ewig dauert.
Es kann solche Zwischenfälle geben, in denen die Einschwingvorgänge in den Schaltungen keine Zeit haben, von Impuls zu Impuls praktisch zu enden, obwohl die wirkenden Signale weiterhin Impuls genannt werden. In solchen Fällen treten zusätzliche Verzerrungen der Pulsform auf, verursacht durch die Überlagerung des Einschwingvorgangs zu Beginn des nächsten Pulses.
Es gibt zwei Arten von Impulsen: Videoimpulse und Funkimpulse ... Beim Schalten (Schalten) eines Gleichstromkreises werden Videoimpulse empfangen. Solche Pulse enthalten keine hochfrequenten Schwingungen und haben einen von Null verschiedenen konstanten Anteil (Mittelwert).
Videopulse werden normalerweise durch ihre Form unterschieden. In Abb. 1.6. die gängigsten Videoimpulse werden angezeigt.


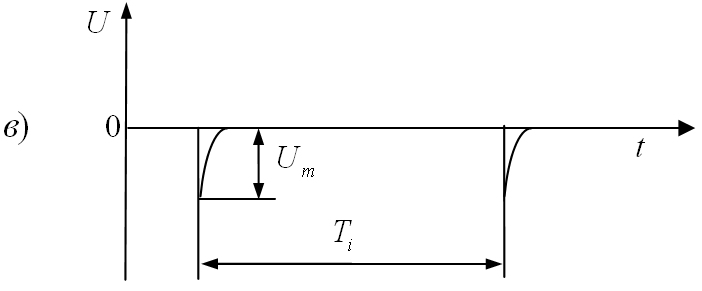


Reis. 1.6. Videopulsformen:
ein) rechteckig; B) trapezförmig; v) stachelig;
G) Sägezahn; e) dreieckig; e) entgegengesetzte Polarität.
Betrachten Sie die Hauptparameter eines einzelnen Pulses (Abbildung 1.7).

Reis. 1.7. Einzelpulsparameter
Die Form der Pulse und die Eigenschaften ihrer einzelnen Abschnitte werden quantitativ durch folgende Parameter bewertet:
· Ähm - die Amplitude (höchster Wert) des Impulses. Pulsamplitude Ähm (ich bin) in Volt (Ampere) ausgedrückt.
· τ und - Pulsdauer. Üblicherweise werden Messungen der Dauer von Pulsen oder einzelnen Abschnitten auf einem bestimmten Niveau von ihrer Basis aus durchgeführt. Ist dies nicht angegeben, wird die Pulsdauer auf Nullniveau bestimmt. Meistens wird die Pulsdauer jedoch auf der Ebene bestimmt 0,1Um oder 0,5Um , von der Basis aus gezählt. Im letzteren Fall heißt die Pulsdauer aktiv Dauer und bezeichnet τ und ... Bei Bedarf und je nach Form der Pulse werden die akzeptierten Werte der Pegel für die Messung speziell ausgehandelt.
· f - Anstiegszeit, bestimmt durch die Anstiegszeit des Impulses vom Füllstand 0,1Um nivellieren 0,9Um .
· τ so - die Dauer des Cutoffs (nachlaufende Flanke), bestimmt durch die Abklingzeit des Impulses vom Pegel 0,9Um nivellieren 0,1Um ... Wenn die Dauer der steigenden oder fallenden Flanke am Pegel gemessen wird 0,5Um , sie wird als aktive Dauer bezeichnet und wird durch den Zusatz des Indexes angezeigt "ein" ähnlich der aktiven Pulsbreite. In der Regel f und τ so beträgt einige Prozent der Pulsdauer. Je weniger f und τ so im Vergleich zu τ und , desto mehr nähert sich die Form des Impulses einem Rechteck. Manchmal statt f und τ so Pulsfronten sind durch die Anstiegsgeschwindigkeit (Abfall) gekennzeichnet. Dieser Wert heißt Steilheit (S) der Front (Schnitt) und ausgedrückt in Volt pro Sekunde (V/mit) oder Kilovolt pro Sekunde (kV/mit) ... Für Rechteckimpuls
 ………………………………(1.14).
………………………………(1.14).
· Der Abschnitt des Pulses zwischen den Fronten wird Flat Top genannt. Abbildung 1.7 zeigt den Abfall eines flachen Kreisels (U) .
· Pulsleistung. Energie W der Puls bestimmt, bezogen auf seine Dauer, die Leistung im Puls:
 ………………………………(1.15).
………………………………(1.15).
Es wird in Watt ausgedrückt (W) , Kilowatt (kW) oder Brucheinheiten
tsak watt.
Pulsgeräte verwenden Pulse mit einer Dauer von Bruchteilen einer Sekunde bis zu Nanosekunden. (10 - 9 s) .
Die charakteristischen Abschnitte des Pulses (Abbildung 1.8), die seine Form bestimmen,
sind:
Vorderseite (1 - 2);
Oben (2 - 3);
· Cut (3 - 4), manchmal auch als Hinterkante bezeichnet;
· Schwanz (4 - 5).
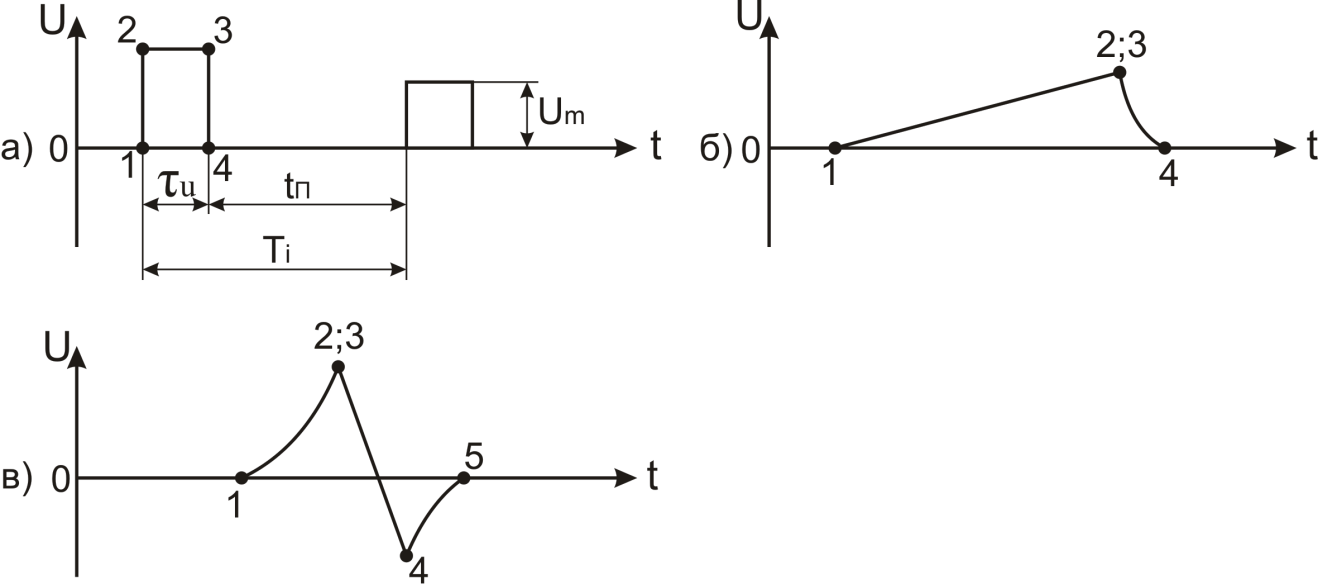
Abbildung 1.8. Typische Pulsabschnitte
Einzelne Impulsabschnitte unterschiedlicher Form können fehlen. Es ist zu beachten, dass echte Impulse keine Form haben, die dem Namen strikt entspricht. Unterscheiden Sie zwischen Impulsen positiver und negativer Polarität sowie bilateralen (entgegengesetzten) Impulsen
(Abb. 1.6, e).
Funkpulse sind Pulse hochfrequenter Spannungs- oder Stromschwankungen, meist sinusförmig. Funkimpulse haben keine konstante Komponente. Funkimpulse werden durch Modulation hochfrequenter Sinusschwingungen in der Amplitude gewonnen. In diesem Fall wird die Amplitudenmodulation gemäß dem Gesetz des Steuervideoimpulses durchgeführt. Die Formen der entsprechenden Funkpulse, die durch Amplitudenmodulation erhalten wurden, sind in Abb. 1.9:

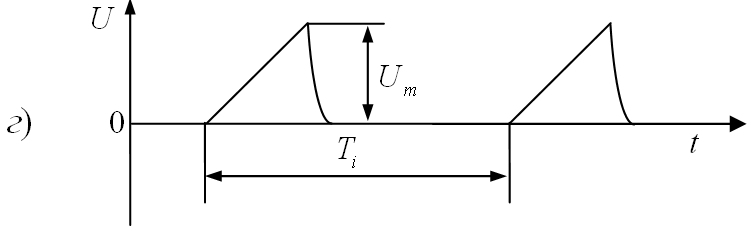
Abbildung 1.9. Formen von Funkimpulsen
In regelmäßigen Abständen aufeinanderfolgende elektrische Impulse nennt man periodische Folge (Abbildung 1.10).
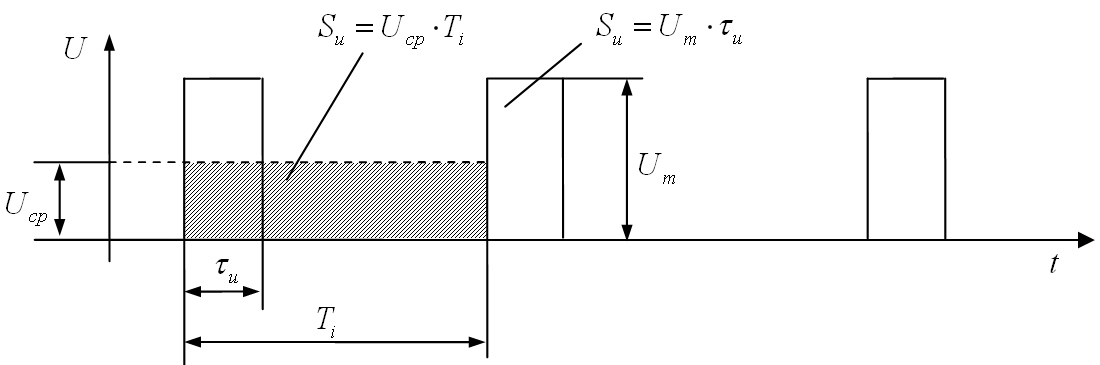
Abbildung 1.10. Periodischer Pulszug
Die periodische Impulsfolge ist durch folgende Parameter gekennzeichnet:
Wiederholungszeitraum T i - das Zeitintervall zwischen dem Beginn zweier benachbarter unipolarer Impulse. Es wird in Sekunden ausgedrückt (mit) oder ein Vielfaches einer Sekunde (ms; μs; ns). Der Kehrwert der Wiederholungsperiode wird Pulswiederholungsfrequenz (Wiederholungsfrequenz) genannt. Er bestimmt die Anzahl der Impulse in einer Sekunde und wird in Hertz . ausgedrückt (Hz) , Kilohertz (kHz) usw.
 ……………………………….. (1.16)
……………………………….. (1.16)
· Das Tastverhältnis einer Pulsfolge ist das Verhältnis der Wiederholungsperiode zur Pulsbreite. Gekennzeichnet durch einen Buchstaben Q :
 ………………… (1.17)
………………… (1.17)
Das Tastverhältnis ist eine dimensionslose Größe, die in einem sehr weiten Bereich schwanken kann, da die Pulsdauer hundert- oder sogar tausendmal kleiner als die Pulsperiode sein kann oder umgekehrt den größten Teil der Periode einnehmen kann.
Der Kehrwert des Tastverhältnisses wird Tastverhältnis genannt. Diese Größe ist dimensionslos, kleiner als eins. Es wird mit dem Buchstaben bezeichnet γ :
 …………………………(1.18)
…………………………(1.18)
Pulszug mit q = 2 namens Mäander ... Eine solche
Sequenzen  (Abbildung 1.6, e). Wenn Т ich >> τ und
, dann heißt eine solche Folge Radar.
(Abbildung 1.6, e). Wenn Т ich >> τ und
, dann heißt eine solche Folge Radar.
· Durchschnittswert (konstante Komponente) der Impulsschwankungen. Bei der Ermittlung des Mittelwertes der Impulsschwingung über die Periode U Mi (oder ich Wed) der Spannungs- oder Stromimpuls wird gleichmäßig über den gesamten Zeitraum verteilt, so dass die Fläche U cf · T i war gleich der Pulsfläche S u = U m τ und (Abb. 1.10).
Für Pulse beliebiger Form wird der Mittelwert aus dem Ausdruck
 ……………………(1.19),
……………………(1.19),
wobei U (t) ein analytischer Ausdruck für die Pulsform ist.
Für eine periodische Impulsfolge rechteckig, in welchem U (t) = U m , Wiederholungsperiode T i und Pulsdauer τ und , hat dieser Ausdruck nach Substitution und Transformation die Form:
 …………………….(1.20).
…………………….(1.20).
Aus Abb. 1.10 man sieht das S u = U m τ und = U cf · T i , woraus folgt:
 ……………(1.21),
……………(1.21),
wo U 0 - wird als konstante Komponente bezeichnet.
Somit ist der Mittelwert (konstante Komponente) der Spannung (Strom) der Folge von Rechteckimpulsen in Q mal kleiner als die Pulsamplitude.
· Durchschnittliche Leistung der Pulsfolge. Pulsenergie W bezogen auf die Periode T i , bestimmt die durchschnittliche Pulsleistung
 …………………………….. (1.22).
…………………………….. (1.22).
Ausdrücke vergleichen P und und P Mi , wir bekommen
P u τ u = P cf T i ,
woher folgt
 …………………(1.23)
…………………(1.23)
und  ……………………. (1.24),
……………………. (1.24),
jene. Durchschnittsleistung und Pulsleistung unterscheiden sich in Q wenn.
Daraus folgt, dass die vom Generator bereitgestellte Pulsleistung Q mal die durchschnittliche Leistung des Generators.
Aufgaben und Übungen
1. Die Pulsamplitude beträgt 11 kV, die Pulsdauer beträgt 1 µs. Bestimmen Sie die Steigung der Vorderflanke des Impulses unter der Annahme, dass die Anstiegszeit 20 % der Impulsbreite beträgt.
2. Die Amplitude von Rechteckimpulsen mit einer Wiederholrate von 1250 Hz und einem Tastverhältnis von 2300 beträgt 11 kV. Bestimmen Sie die Steigung der Vorderflanke und des Cutoffs, wenn wir die Dauer von Vorderflanke und Cutoff gleich 20 % der Pulsdauer betrachten.
3. Bestimmen Sie die Zeitkonstante einer Schaltung bestehend aus einem 5000 pF Kondensator und einem aktiven Widerstand von 0,5 MOhm.
4. Bestimmen Sie die Zeitkonstante einer Schaltung bestehend aus einer Induktivität von 20 mH und einem aktiven Widerstand von 5 kOhm.
5. Bestimmen Sie die durchschnittliche Leistung des Radarsendegeräts mit den folgenden Parametern: Impulsleistung 800 kW; die Dauer des Sondenimpulses beträgt 3,2 µs; die Wiederholrate der Schallimpulse beträgt 375 Hz.
6. Ein 400-pF-Kondensator wird von einer 200-V-Konstantspannungsquelle über einen 0,5 MΩ-Widerstand geladen. Bestimmen Sie die Spannung am Kondensator 600 μs nach Ladebeginn.
7. An die Schaltung, bestehend aus einem Kondensator mit einer Kapazität von 10 pF und einem Widerstand von 2 MΩ, ist eine Gleichstromquelle mit einer Spannung von 50 V angeschlossen.Bestimmen Sie den Strom im Moment des Einschaltens und 40 μs nach dem Einschalten An.
8. Ein auf 300 V aufgeladener Kondensator wird über einen 300 MΩ Widerstand entladen. Bestimmen Sie den Wert des Entladestroms über die Zeit t = 3τ nach Beginn der Entladung.
9. Wie lange dauert es, einen 100 pF-Kondensator auf eine Spannung von 340 V aufzuladen, wenn die Spannung der Quelle 540 V beträgt und der Widerstand der Ladeschaltung 100 kΩ beträgt?
10. Der Stromkreis, bestehend aus einer Induktivität von 10 mH und einem Widerstand von 5 kOhm, wird an eine Konstantspannungsquelle von 250 V angeschlossen. Bestimmen Sie den Strom, der im Stromkreis 4 μs nach dem Einschalten fließt.
Kapitel 2. Pulsformung
Lineare und nichtlineare Schaltungen
In der Impulstechnik werden häufig Schaltungen und Geräte verwendet, die Spannungen einer Form aus der Spannung einer anderen bilden. Solche Probleme werden mit linearen und nichtlinearen Elementen gelöst.
Ein Element, dessen Parameter (Widerstand, Induktivität, Kapazität) nicht von der Größe und Richtung der Ströme und angelegten Spannungen abhängen, wird als linear bezeichnet
linear.
Lineare Schaltungseigenschaften:
· Die Strom-Spannungs-Kennlinie (VAC) einer linearen Schaltung ist eine Gerade, d.h. die Werte von Strömen und Spannungen werden durch lineare Gleichungen mit konstanten Koeffizienten miteinander in Beziehung gesetzt. Ein Beispiel für ein CVC dieses Typs ist das Ohmsche Gesetz:  .
.
· Für die Berechnung (Analyse) und Synthese von linearen Schaltungen wenden wir das Prinzip der Überlagerung (Overlay) an. Das Superpositionsprinzip hat folgende Bedeutung: Wenn an den Eingang einer linearen Schaltung eine sinusförmige Spannung angelegt wird, hat die Spannung an jedem ihrer Elemente die gleiche Form. Wenn die Eingangsspannung ein komplexes Signal ist (d. h. die Summe der Harmonischen), dann bleiben alle harmonischen Komponenten dieses Signals auf jedem Element der linearen Schaltung erhalten: mit anderen Worten, die Form der an die angelegten Spannung Eingabe bleibt erhalten. In diesem Fall ändert sich am Ausgang der Linearschaltung nur das Verhältnis der harmonischen Amplituden.
· Die lineare Schaltung wandelt das Spektrum des elektrischen Signals nicht um. Es kann die Komponenten des Spektrums nur in Amplitude und Phase ändern. Dies ist der Grund für das Auftreten lineare Verzerrung .
· Jede echte lineare Schaltung verzerrt die Wellenform aufgrund von Transienten und endlicher Bandbreite.
Streng genommen sind alle Elemente elektrischer Schaltungen nichtlinear. In einem gewissen Variationsbereich von Variablenwerten tritt jedoch die Nichtlinearität der Elemente so gering auf, dass sie praktisch vernachlässigt werden kann. Ein Beispiel ist ein Hochfrequenzverstärker (HF-Verstärker) eines Funkempfängers, an dessen Eingang ein Signal von einer Antenne eine sehr kleine Amplitude hat.
Die Nichtlinearität der Eingangskennlinie des Transistors in der ersten Stufe des HF-Verstärkers ist innerhalb weniger Mikrovolt so gering, dass sie einfach nicht berücksichtigt wird.
Normalerweise ist der Bereich des nichtlinearen Verhaltens eines Elements begrenzt und der Übergang zur Nichtlinearität kann entweder allmählich oder abrupt erfolgen.
Wird an den Eingang einer Linearschaltung ein komplexes Signal angelegt, das die Summe der Oberwellen verschiedener Frequenzen ist und die Linearschaltung ein frequenzabhängiges Element enthält ( L oder C ), dann wird die Form der Spannungen an seinen Elementen nicht die Form der Eingangsspannung wiederholen. Dies liegt daran, dass Oberwellen der Eingangsspannung von einer solchen Schaltung unterschiedlich durchgelassen werden. Als Ergebnis des Durchgangs des Eingangssignals durch die Kapazitäten und Induktivitäten der Schaltung ändert sich die Beziehung zwischen den harmonischen Komponenten an den Schaltungselementen in Amplitude und Phase in Bezug auf das Eingangssignal. Als Ergebnis sind die Beziehungen zwischen den Amplituden und Phasen der Oberwellen am Eingang der Schaltung und an ihrem Ausgang nicht gleich. Diese Eigenschaft ist die Grundlage für die Pulsbildung mit linearen Schaltungen.
Ein Element, dessen Parameter von der Größe und Polarität der angelegten Spannungen oder fließenden Ströme abhängen, heißt nichtlinear , und eine Kette mit solchen Elementen heißt nichtlinear .
Zu den nichtlinearen Elementen gehören Elektrovakuumgeräte (EVD), Halbleitergeräte (PPP), die im nichtlinearen Abschnitt der I-V-Kennlinie arbeiten, Dioden (Vakuum und Halbleiter) sowie Transformatoren mit Ferromagneten.
Nichtlineare Schaltungseigenschaften:
· Der durch das nichtlineare Element fließende Strom ist nicht proportional zur angelegten Spannung, d.h. die Beziehung zwischen Spannung und Strom (VAC) ist nichtlinear. Ein Beispiel für einen solchen CVC sind die Eingangs- und Ausgangseigenschaften des EEC und des RFP.
Prozesse in nichtlinearen Schaltungen werden durch nichtlineare Gleichungen beschrieben verschiedener Art, deren Koeffizienten von der Spannungs-(Strom-)Funktion selbst oder von ihren Ableitungen abhängen, und die I-V-Kennlinie einer nichtlinearen Schaltung hat die Form einer Kurve oder einer gestrichelten Linie. Ein Beispiel sind die Eigenschaften von Dioden, Trioden, Thyristoren, Zenerdioden usw.
· Bei nichtlinearen Schaltungen ist das Superpositionsprinzip nicht anwendbar. Wenn ein externes Signal auf nichtlineare Schaltungen einwirkt, treten in ihnen immer Ströme auf, die in ihrer Zusammensetzung neue Frequenzkomponenten enthalten, die nicht im Eingangssignal enthalten waren. Dies ist der Grund für das Auftreten
nichtlineare Verzerrung , wodurch das Signal am Ausgang nichtlinear ist
die Schaltung hat immer eine andere Form als das Eingangssignal.
Differenzierungskreise
Um in Schwung zu kommen gewünschte Form Aus einer gegebenen Spannungswellenform unter Verwendung einer passiven elektrischen Schaltung ist es notwendig, die Formungseigenschaften dieser Schaltung zu kennen. Formgebungseigenschaften charakterisieren die Fähigkeit einer linearen Schaltung, die Form des übertragenen (verarbeiteten) Signals in bestimmter Weise zu verändern und werden vollständig durch die Art seiner Frequenz und Zeit bestimmt. NS x-Eigenschaften.
In der Pulstechnik werden häufig lineare Zwei- und Viertornetzwerke zur Signalerzeugung eingesetzt.
Differenzieren Schaltung genannt, an deren Ausgang die Spannung proportional zur ersten Ableitung der Eingangsspannung ist. Mathematisch wird dies durch die folgende Formel ausgedrückt:
 ………………………. (2.1),
………………………. (2.1),
wo U in - Spannung am Eingang der Differenzierschaltung;
Du bist raus- Spannung am Ausgang der Differenzierschaltung;
k - Verhältnismäßigkeitskoeffizient.
Differenzierschaltungen (DC) werden verwendet, um Videoimpulse zu unterscheiden. Gleichzeitig ermöglichen die Differenzierschaltungen die Durchführung folgender Transformationen:
· Verkürzung rechteckiger Videoimpulse und Bildung von spitzen Impulsen daraus, die zur Triggerung und Synchronisation verschiedener Impulsgeräte dienen;
· Erhalten von Zeitableitungen komplexer Funktionen. Es wird in Messtechnik, Auto-Control- und Auto-Tracking-Systemen eingesetzt;
· Bildung von Rechteckimpulsen aus Sägezahn.
Die einfachsten Differenzierschaltungen sind kapazitiv ( RC ) und induktiv ( RL ) Ketten (Abbildung 2.1):


Abbildung 2.1. Arten von Differenzierschaltungen:
ein) kapazitiver Gleichstrom; B) induktiver Gleichstrom
Lass uns das zeigen RC - die Kette wird unter bestimmten Bedingungen differenzierend.
Es ist bekannt, dass der durch den Kondensator fließende Strom durch den Ausdruck bestimmt wird:
 ........................................... (2.2).
........................................... (2.2).
Gleichzeitig ist aus Abbildung 2.1 ein Es ist klar, dass
 ,
,
schon seit R und C einen Spannungsteiler darstellen. Da die Spannung
 , dann .
, dann .
Ausgangsspannung
 ………………….... (2.3).
………………….... (2.3).
Setzen wir den Ausdruck (2.2) in (2.3) ein, erhalten wir:
 ……………… (2.4).
……………… (2.4).
Wählen wir einen ausreichend kleinen Wert R damit die Bedingung erfüllt ist,
dann erhalten wir eine ungefähre Gleichheit
 ……………………….. (2.5).
……………………….. (2.5).
Diese Gleichheit ist identisch mit (2.1).
Auswählen R von ausreichend kleinem Wert bedeutet, die Erfüllung der Ungleichung zu gewährleisten
wo ω in = 2πf in - die obere Grenzfrequenz der Harmonischen des Ausgangssignals, die noch notwendig für die Ausgangsimpulsform.
Der Proportionalitätskoeffizient in Ausdruck (2.1) k = RC = trägt den Namen Zeitkonstante differenzierende Schaltung. Je abrupter sich die angelegte Spannung ändert, desto kleiner ist der Wert τ muss eine Differenzierschaltung haben, damit die Spannung am Ausgang die Form der Ableitung von hat U in ... Parameter = RC hat die Dimension der Zeit. Dies lässt sich dadurch bestätigen, dass nach dem Internationalen Einheitensystem (SI) die Maßeinheit für den elektrischen Widerstand
 ,
,
und die Maßeinheit für die elektrische Kapazität
 .
.
Somit,

Das Funktionsprinzip der Differenzierschaltung.
Ein schematisches Diagramm einer kapazitiven Differenzierschaltung ist in Abb. 2.2 gezeigt, und die Spannungsdiagramme sind in Abb. 2.3 gezeigt.
![]()
Abbildung 2.2. Schematische Darstellung einer kapazitiven Differenzierschaltung
An den Eingang lege man einen idealen Rechteckimpuls an, für den
τ ф = τ с = 0, ein Innenwiderstand Signalquelle R i = 0 .Der Impuls sei durch folgenden Ausdruck bestimmt:

- Der Anfangszustand der Schaltung (t< t 1).
Im Originalzustand U in = 0; Du mit = 0; ich mit = 0; Du bist raus = 0.
- Erster Spannungssprung (t = t 1).
Zum Zeitpunkt t = t 1 liegt am DC-Eingang ein Spannungssprung an
U ein = E... In diesem Moment Uc = 0 schon seit für einen unendlich kleinen Zeitraum kann die Kapazität nicht geladen werden. Aber nach dem Kommutierungsgesetz kann der Strom durch den Kondensator sofort ansteigen. Daher ist zum Zeitpunkt t = t 1 der durch den Kondensator fließende Strom gleich

Daher ist die Spannung am Ausgang der Schaltung in diesem Moment gleich

- Kondensatorladung (t 1< t < t 2).
Nach dem Sprung beginnt sich der Kondensator mit einem exponentiell abnehmenden Strom aufzuladen:

Abbildung 2.3. Spannungsdiagramme an den Elementen des Differenzierungskreises
Die Spannung am Kondensator wächst exponentiell
 …………………… (2.6).
…………………… (2.6).
Die Spannung am DC-Ausgang sinkt mit steigender Spannung
Ladung auf dem Kondensator, weil R und C einen Spannungsteiler darstellen:
 …………. (2.7).
…………. (2.7).
Es muss daran erinnert werden, dass für den Spannungsteiler jederzeit die Gleichheit
woraus folgt das
was die Gültigkeit des Ausdrucks (2.7) bestätigt.
Theoretisch dauert die Ladung des Kondensators unendlich lange, aber in der Praxis endet dieser Einschwingvorgang nach
(3…5)τ aufladen
= (3…5)RC
. 
- Ende der Kondensatorladung (t = t 2).
Nach dem Ende des Einschwingvorgangs wird der Kondensatorladestrom null. Daher ist die Spannung am Ausgang der Differenzierschaltung

erreicht fast den Nullwert, d.h. zum Zeitpunkt t = t 2


- Stationärer Modus (t 2< t < t 3).
Dabei 


- Zweiter Spannungssprung (t = t 3).
Zu einem bestimmten Zeitpunkt t = t3
die Spannung am Eingang der Differenzierschaltung fällt schlagartig auf Null. Kondensator C
wird zur Spannungsquelle, denn es wird in der Größenordnung aufgeladen  .
.
Da sich nach dem Kommutierungsgesetz die Spannung am Kondensator nicht sprunghaft ändern kann und sich der durch den Kondensator fließende Strom sprunghaft ändern kann, ist im Moment t = t3 die Ausgangsspannung fällt schlagartig auf – E ... In diesem Fall ist der Entladestrom in dieser Moment Zeit wird maximal:
 ,
,
und die Spannung am Ausgang der Differenzierschaltung
 .
.
Die Ausgangsspannung hat ein Minuszeichen, weil der Strom hat seine Richtung geändert.
- Kondensatorentladung (t 3< t < t 4).
Nach dem zweiten Sprung beginnt die Spannung am Kondensator exponentiell zu sinken:
 ;
;  ;
; 
- Das Ende der Kondensatorentladung und die Wiederherstellung des Ausgangszustandes der Schaltung (t≥ t4).
Nach Beendigung des Einschwingvorgangs der Kondensatorentladung

Somit kehrte die Schaltung in ihren ursprünglichen Zustand zurück. Das Ende der Kondensatorentladung erfolgt praktisch bei t = (3… 5) τ = (3… 5) RC.
Da wir den Innenwiderstand der Signalquelle genommen haben R i = 0, dann können wir annehmen, dass die Zeitkonstanten der Lade- und Entladekreise des Kondensators τ Ladung = τ mal = τ =RC .
In einer solchen idealen Schaltung ist die Amplitude der Ausgangsspannung U aus. m ah hängt nicht vom Wert der Schaltungsparameter ab R und C , und die Dauer der Impulse am Ausgang wird durch den Wert der Schaltungszeitkonstante bestimmt = RC ... Je kleiner der Wert R und C , je schneller die Einschwingvorgänge des Ladens und Entladens der Kapazität enden, desto kürzer ist der Impuls am Ausgang der Schaltung.
Theoretisch erweist sich die Dauer des Impulses am Ausgang des Differenzierkreises, bestimmt von der Basis, als unendlich lang, da die Spannung am Ausgang exponentiell abfällt. Daher wird die Pulsdauer auf einem bestimmten Niveau von der Basis bestimmt
U 0 = αU aus (Abbildung 2.4):

Abbildung 2.4. Ermittlung der Pulsdauer in der Ebene U 0 nach
Unterscheidung
Bestimmen wir die Dauer des differenzierten Impulses auf der Ebene
U 0 = αU aus :
 ………………. (2.8),
………………. (2.8),
wo  und
und  ……………………… (2.9).
……………………… (2.9).
Die Differenzierung geht immer mit einer Verkürzung der Pulsbreite einher. Dies bedeutet, dass die Kapazität C muss während der Zeit des effektiven differenzierten Eingangsimpulses Zeit zum vollständigen Aufladen haben. Voraussetzung für eine praktische Differenzierung zur Verkürzung der Pulsdauer ist daher das Verhältnis:
τ und in > 5τ = 5RC.
Je weniger τ Schaltung, je schneller der Kondensator geladen und entladen wird und je kürzer die Dauer der Ausgangsimpulse ist, desto spitzer werden sie und desto genauer die Differenzierung. Reduzieren Sie jedoch τ bis zu einer gewissen Grenze sinnvoll.
Die Änderung der Pulsform am Ausgang der Differenzierschaltung lässt sich spektralanalytisch erklären.
Jede Harmonische des Eingangsimpulses wird aufgeteilt in R und C ... Für Obertöne niedrige Frequenzen Definiert die Spitze des Eingangsimpulses, stellt der Kondensator einen großen Widerstand dar, da
 >> R
.
>> R
.
Daher wird die flache Spitze des Eingangsimpulses kaum zum Ausgang übertragen.
Für die hochfrequenten Komponenten des Eingangsimpulses, die seine Vorder- und Grenzflanke bilden,
 << R
.
<< R
.
Somit werden Vorder- und Flanke des Eingangsimpulses praktisch ohne Dämpfung zum Ausgang übertragen. Diese Überlegungen ermöglichen es, die Differenzierschaltung zu definieren als Hochpassfilter .
Elektrischer Impuls, kurzfristige Änderung der elektrischen Spannung oder des Stroms. Ein kurzer ist ein Zeitraum, der mit der Dauer vergleichbar ist transiente Prozesse in Stromkreisen ... Ich. e. unterteilt in Hochspannungsimpulse, hochfeste Stromimpulse, Videoimpulse und Funkimpulse. Ich. e. hohe Spannungen werden normalerweise beim Entladen eines Kondensators auf eine ohmsche Last erhalten und haben eine aperiodische Form. Blitzeinschläge haben normalerweise die gleiche Form. Einzelgänger I. e. ähnlicher Form mit einer Amplitude von mehreren qm bis zu mehreren Mv mit einer Wellenfront 0,5-2 Mikrosekunden und Dauer 10-10 -2 Mikrosekunden zum Prüfen elektrischer Geräte und Betriebsmittel in der Hochspannungstechnik. Stromsprünge großer Stärke können eine ähnliche Form haben wie I. e. Hochspannung (s. Impulstechnik Hochspannung).
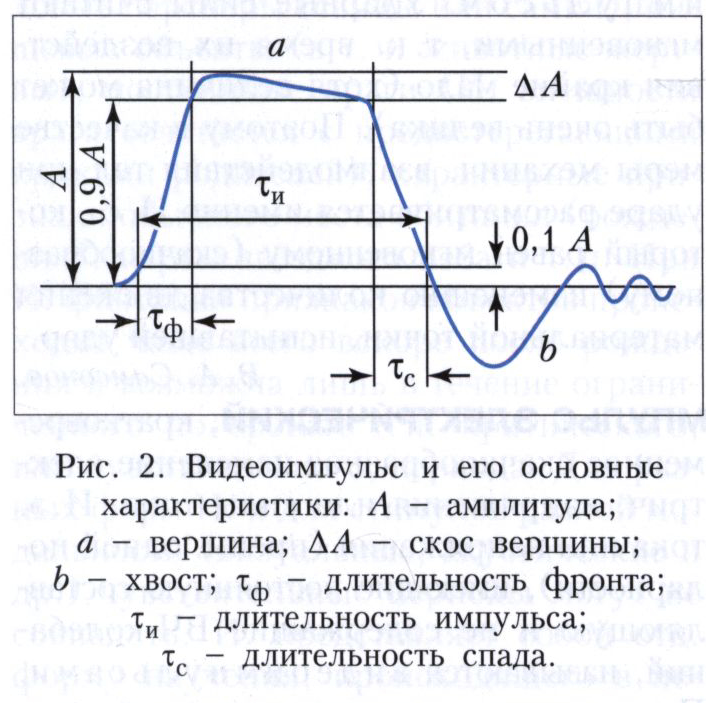
Videoimpulse werden als I. e. Strom oder Spannung (hauptsächlich mit gleicher Polarität) mit einer von Null verschiedenen konstanten Komponente. Unterscheiden Sie zwischen Rechteck-, Sägezahn-, Trapez-, Exponential-, Glocken- und anderen Videoimpulsen ( Reis. 1 , Anzeige). Die charakteristischen Elemente, die die Form und die quantitativen Parameter des Videoimpulses bestimmen ( Reis. 2 ) sind die Amplitude A, die Front t f, die Dauer t und der Abfall t c und die Steigung der Spitze (D A), üblicherweise ausgedrückt in % von A. ... Dauer der Videoimpulse - von Brüchen Sek zu Zehnteln nsec (10 -9 Sek). Videoimpulse werden in Fernsehen, Computer, Radar, Experimentalphysik, Automatisierung usw. verwendet.
Intermittierende HF- oder UHF-Schwingungen von elektrischem Strom oder Spannung ( Reis. 1 , e), deren Amplitude und Dauer von den Parametern der modulierenden Schwingungen abhängen. Dauer und Amplitude der Funkimpulse entsprechen den Parametern der modulierenden Videoimpulse; zusätzlicher Parameter - Trägerfrequenz. Funkimpulse werden hauptsächlich in der Funk- und Kommunikationstechnik verwendet. Die Dauer von Funkimpulsen reicht von Bruchteilen Sek Vor nsek.
Zündete .: Itskhoki Ya. S., Impulse devices, M., 1959; Grundlagen der Impulstechnik, M., 1966; Brammer Yu.A., Pashchuk I.N., Impulstechnik, 2. Aufl., M., 1968.
Große sowjetische Enzyklopädie M.: "Sowjetische Enzyklopädie", 1969-1978
Typische Beispiele für Rechteckimpulse sind primäre Telegrafen- und Datensignale, auch DC-Impulse genannt. Sie haben die Form von Folgen bipolarer oder unipolarer Rechteckimpulse (Abb. 6.1, a).
Finden wir das Spektrum einer periodischen Folge unipolarer Pulse mit einer Periode und Amplitude UQ. Eine solche Folge kann als Fourier-Reihe dargestellt werden:

wo ist die zirkuläre Wiederholungsrate oder die erste Harmonische (spektrale Komponente) des Signals

Reis. 6.1 Pulsfolge (a) und ihr Spektrum (b)
Die Koeffizienten bestimmen das sogenannte Amplitudenspektrum und das Phasenspektrum. Dabei
![]()
wo ist das Tastverhältnis der Impulsfolge. Die konstante Komponente oder der Mittelwert des Signals über die Periode. Das Amplitudenspektrum für den Fall ist in Abb.
Das Spektrum einer periodischen Folge unipolarer Pulse at enthält neben dem konstanten Anteil Anteile mit Frequenzen etc. In diesem Fall wird der Begriff der spektralen Dichte eingeführt. Die spektrale Dichte ist definiert als das Verhältnis der "Amplitude von die Spektralkomponente" in das infinitesimale Frequenzband und wird über das Fourier-Integral berechnet:

wo ist die spektrale Dichte der Amplituden; - Spektrum der Phasen.
Wenn man es kennt, kann man es mit der inversen Fourier-Transformation herausfinden:

Die spektrale Dichte der Amplituden eines einzelnen Rechteckimpulses auf einen Faktor genau ist in Abb.
Das Spektrum einer periodischen Pulsfolge und eines Einzelpulses enthält Komponenten mit einer Frequenz von 0 bis unendlich, ist also unendlich. Wird eine Folge von Rechteckwellen über einen Kommunikationskanal übertragen, der immer nur ein begrenztes Spektrum durchlässt, dann ändert sich die Wellenform am Ausgang des Kanals. Die Wellenform kann mit der inversen Fourier-Transformation (6.6) bestimmt werden.
In der Praxis wird unter der Bandbreite des Signals meist der Frequenzbereich verstanden, in dem die Hauptsignalenergie konzentriert ist. In diesem Fall wird das Konzept der effektiven Breite des Signalspektrums eingeführt. In Abb. - Dies ist der Frequenzbereich von 0 bis in dem ca. 90 % der Signalenergie konzentriert sind. Das heißt, je kürzer die Pulsdauer (je höher die Telegrafiegeschwindigkeit), desto breiter das Spektrum. Insbesondere hat ein unendlich kurzer Puls ein unendlich erweitertes Spektrum mit gleichförmiger Dichte. Somit erfordert eine Übertragung mit höherer Rate Kanäle mit höherer Bandbreite.
Für eine gegebene Dauer eines Einheitselements beeinflussen zwei Faktoren das Spektrum des übertragenen Signals. Eine davon ist die Pulsform, die sorgfältig ausgewählt werden muss, um ein gutes (kompaktes) Signalspektrum zu erhalten. Ein weiterer Faktor ist die Art der übertragenen digitalen Sequenz, d. h. das Spektrum hängt von den statistischen Eigenschaften der übertragenen Sequenz ab, und das Spektrum kann durch Umcodieren geändert werden.
Betrachten Sie zum Bewerten der spektralen Clipping-Verzerrung von DC-Impulsen den Durchgang eines Impulses durch einen idealen Tiefpassfilter (LPF). Als Eingabe verwenden wir die Schrittfunktion
grafisch dargestellt in Abb. 6.2. Die Wahl einer solchen Eingangsaktion ist darauf zurückzuführen, dass ihre Verwendung erstens mathematische Berechnungen vereinfacht und zweitens ein einzelner Rechteckimpuls endlicher Dauer als Folge von zwei Einheitsspannungsstößen mit entgegengesetztem Vorzeichen dargestellt werden kann, die um . verschoben sind Zeit um einen Betrag gleich der Impulsdauer (Abb. . 6.3).
Reis. 6.2 Step-Funktion
Reis. 6.3. Einzelpulsdarstellung

Reis. 6.4. Eigenschaften eines idealen Tiefpassfilters
Und schließlich, wenn man die Eigenschaften des Einschwingvorgangs unter der Wirkung eines einzelnen Sprungs kennt, kann man unter Verwendung des Faltungssatzes den Einschwingvorgang für eine beliebige Aktionsform finden.
Am Eingang eines idealen Tiefpassfilters mit einer Grenzfrequenz, deren Amplituden- und Phasen-Frequenz-Verlauf die Form hat (Abb.6.4):

wo ist die Gruppenzeit des Filters in dem Moment, in dem das Signal (6.7) geliefert wird, was in der Form dargestellt werden kann

Um das Signal am Ausgang des Tiefpassfilters zu erhalten, multiplizieren wir alle Komponenten des Eingangssignals mit dem Modul der Filterverstärkung und subtrahieren die Phasenverschiebung bei jeder der Frequenzen vom Sinusargument:
Setzen wir in (6.9) den Wert des Transmissionskoeffizienten aus (6.8) ein, erhalten wir
ELEKTRISCHER IMPULS, kurzzeitige abrupte Änderung der elektrischen Spannung oder des Stroms. Als Videopulse bezeichnet man einen elektrischen Strom- oder Spannungspuls (meist gleicher Polarität), der eine konstante Komponente hat und keine HF-Schwingungen enthält. Aufgrund der Art der Zeitänderung werden Videoimpulse in rechteckige, sägezahnförmige, trapezförmige, glockenförmige, exponentielle und andere Formen unterschieden (Fig. 1, a-d). Ein echter Videoimpuls kann eine ziemlich komplexe Form haben (Abb. 2), die durch die Amplitude A, die Dauer τ И (gemessen bei einem vorbestimmten Pegel, zum Beispiel 0,1 A oder 0,5 A), die Anstiegszeit τ Ф und . gekennzeichnet ist Zerfall τ С (gemessen zwischen den Pegeln von 0,1 A und 0,9 A), die Abschrägung der Oberseite ΔA (ausgedrückt als Prozentsatz von A). Am weitesten verbreitet sind rechteckige Videoimpulse, auf deren Grundlage in Computertechnik, Radar, Fernsehen, digitalen Übertragungs- und Iusw. Synchronisierungs-, Steuer- und Informationssignale sowie bei der Bildung komplexer Radarsignale gebildet werden mit Intra-Puls-Frequenzmodulation. Die Dauer von Videopulsen reicht von Bruchteilen einer Sekunde bis zu Zehnteln einer Nanosekunde.
Neben einzelnen und unregelmäßig aufeinanderfolgenden Strömen elektrischer Pulse werden in der Praxis auch periodische Sequenzen verwendet, die zusätzlich durch eine Periode T bzw. eine Wiederholrate f = T -1 gekennzeichnet sind. Ein wichtiger Parameter der periodischen Folge elektrischer Pulse ist das Tastverhältnis (das Verhältnis der Pulswiederholungsperiode zu deren Dauer). Hinsichtlich der Frequenzverteilung werden elektrische Pulse durch ein Spektrum charakterisiert, das durch die Erweiterung einer Zeitfunktion erhalten wird, die einen elektrischen Puls in einer Fourier-Reihe (für eine periodische Folge identischer Pulse) oder einem Fourier-Integral (für Einzelimpulse).
Als Funkpulse werden elektrische Pulse bezeichnet, bei denen es sich um zeitlich begrenzte (intermittierende) HF- oder Mikrowellen-Schwingungen handelt, deren Einhüllende die Form eines Videopulses hat (Abb. 1, e). Dauer und Amplitude der Funkimpulse entsprechen den Parametern der modulierenden Videoimpulse; ein zusätzlicher Parameter ist die Trägerfrequenz. Funkimpulse werden hauptsächlich in Funk- und Kommunikationsgeräten verwendet; ihre Dauer reicht von Bruchteilen einer Sekunde bis zu mehreren Nanosekunden.
Lit.: Erofeev Yu N. Impulsgeräte. 3. Aufl. M., 1989; Brammer Yu. A., Pashchuk I. N. Impulstechnik. M., 2005.